ระบบของเครื่องโซน่าร์
ในการหาปลาหรือวัตถุใต้น้ำที่อยู่บริเวณโดยรอบของจุดส่งสัญญาณคลื่นเสียงโซน่าร์หรือเรียกว่า
หัวโซน่าร์ ที่ส่วนใหญ่จะติดตั้งอยู่ใต้ท้องเรือ
มีระบบการทำงานคล้ายกับ
เครื่องหยั่งความลึกน้ำหรือ Echo Sounder
คือใช้การส่งสัญญาณคลื่นวิทยุ
(sound wave) ออกไปโดยรอบหัวส่งสัญญาณและรับสัญญาณสะท้อนกลับมา
เมื่อสัญญาณวิทยุนั้นไปกระทบกับปลา ฝูงปลา หรือวัตถุต่างๆ ที่อยู่ใต้น้ำ
แล้วนำสัญญาณที่รับได้นั้น มาประมวลวิเคราะห์เป็นภาพแบบกราฟิกแสดงบนจอภาพ
เพื่อให้ทราบถึงตำแหน่ง ทิศทาง และระยะ ของฝูงปลา หรือวัตถุที่สะท้อนสัญญาณกลับมา
ระบบดังกล่าวนี้ได้ถูกพัฒนาติดตั้งและใช้งานมาก่อนในเรือดำน้ำและเรือกวาดทุ่นระเบิดในสมัยสงครามโลก
ปัจจุบันได้พัฒนามาใช้ในทางพาณิชย์และอุตสาหกรรมทางเรือ
โดยติดตั้งกับเรือประมงทะเลน้ำลึก เรือเดินทะเลระหว่างประเทศ เรือสำรวจสมุทร
เป็นต้น

หลักการทำงานของเครื่องโซน่าร์
อุปกรณ์ของเครื่องโซน่าร์จะส่งสัญญาณคลื่นเสียงออกไปและคอยเฝ้าฟังสัญญาณคลื่นเสียงที่ไปกระทบกับวัตถุใต้น้ำหรือฝูงปลาแล้วสะท้อนกลับมายังเครื่องโซน่าร์
เพื่อประมวลว่าระยะทางไปและกลับของคลื่นเสียง
ความชัดเจนของเสียงเพื่อแยกแยะประเภทของวัตถุที่กระทบ
ตลอดจนการจดจำการเคลื่อนที่ของวัตถุนั้น เพื่อแสดงข้อมูลบนจอภาพให้ผู้ใช้งานทราบ
เครื่องโซน่าร์เครื่องแรกที่สมบูรณ์แบบถูกผลิตขึ้นเมื่อปี ค.ศ. 1918
โดยรัฐบาลของประเทศอังกฤษและสหรัฐอเมริการ่วมมือกันสร้างขึ้น
โดยหลักการสื่อสารด้วยสัญญาณเสียง(Acoustic Communication System)
เป็นแนวในการพัฒนาระบบของเครื่องโซน่าร์
และรัฐบาลสหรัฐอเมริกาได้บัญญัติศัพท์เฉพาะของเครื่องนี้ว่า SOund Navigation
And Ranging โดยใช้คำย่อว่า SONAR
ส่วนรัฐบาลประเทศอังกฤษเรียกอุปกรณ์นี้ว่า SONAR เหมือนกัน และเรียกชื่อทางทหารว่า
ASDICS ซึ่งย่อมาจากคำว่า Anti-Submarine Detection Investigation Committee System
หรือ อุปกรณ์ตรวจสอบป้องกันภัยจากเรือดำน้ำ

ภาพของเครื่องโซน่าร์แบบ VDS (Variable Depth Sonar) รุ่น DUBV43C
tugged sonars ติดตั้งท้ายเรือฟริเกตหมายเลข F70 ชื่อ La Motte-Picquet

ภาพของหัวโซน่าร์แบบ AN/AQS-13 Dipping sonar
ถูกหย่อนลงจากเฮลิคอปเตอร์ H-3 Sea King เพื่อสำรวจสมุทร

ภาพแสดงคอนโซลเครื่องโซน่าร์ในเรือดำน้ำ
ต่อมาได้มีการพัฒนาระบบเครื่องโซน่าร์ร่วมกับเครื่องหยั่งน้ำ (Echo Sounder)
เป็นผลให้มีผลิตภัณฑ์ของระบบโซน่าร์หลากหลายมากยิ่งขึ้น เช่น เครื่อง
Rapid-Scanning Sonar, เครื่อง Side-Scan Sonar และเครื่อง WPESS (With-in Pulse
Electronic Sector Scanning) Sonar เป็นต้น
ซึ่งส่วนใหญ่ใช้งานสำหรับเรือเฉพาะกิจต่างๆ เช่น เรือปราบเรือดำน้ำ,
เรือสำรวจสมุทรศาสตร์, เรือกวาดทุ่นระเบิด, เรือขุดลอกร่องน้ำ,
เรือวางท่อหรือเคเบิ้ลกลางทะเล เป็นต้น
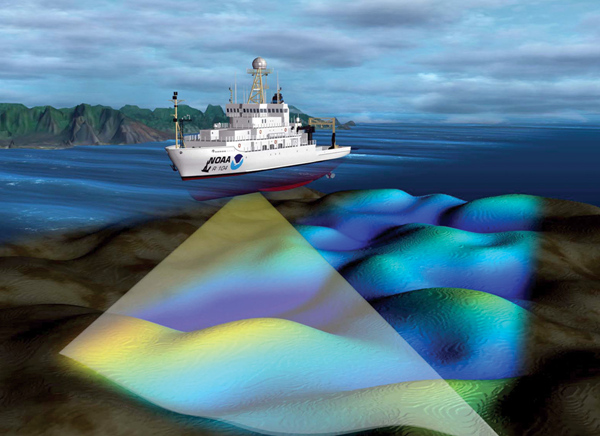
ภาพการใช้เครื่องโซน่าร์สำรวจใต้สมุทรเพื่อการทำแผนที่ทางทะเล



ภาพที่อ่านได้จากหัวโซน่าร์ผ่านโปรแกรมคอมพิวเตอร์

ภาพที่ปรากฏบนหน้าจอของเครื่องโซน่าร์เรือสำรวจสมุทร

ภาพแสดงชุดหัวโซน่าร์ (SONAR Transducer) ที่ติดตั้งใต้ท้องเรือ

จอภาพของเครื่องโซน่าร์แบบ Multibeam Sonar
แสดงวัตถุและพื้นทะเลโดยรอบ

การจัดทำแผนที่ท้องทะเลแบบ 3D
ด้วยเครื่องโซน่าร์