
บทความโดย : Capt. Nemo – กัปตัน นีโม
| สารบัญ | |
| หน้า 1 บทนำการเดินเรือรายงานและเดินเรือชายฝั่งยุคแรกเริ่มของการเดินเรือดาราศาสตร์หน้า 2 การค้นพบโลกใหม่ และการเดินทางรอบโลกหน้า 3 การพัฒนาเครื่องมือเดินเรือดาราศาสตร์รุ่นต่อมากว่าจะมาเป็นแผนที่เดินเรือยุคใหม่กล้องส่องทางไกลและเซ็กส์แตนท์หน้า 4 การหาลองจิจูดในทะเลหน้า 5 การเดินเรือดาราศาสตร์สมัยใหม่เข้าสู่ยุคแห่งการเดินเรืออิเล็กทรอนิกส์ | หน้า 6 ระบบวิทยุหาที่เรือ (RADIO NAVIGATION SYSTEM)หน้า 7 ระบบเดินเรือด้วยแรงเฉื่อย (INERTIAL NAVIGATION SYSTEM)หน้า 8 ระบบหาที่เรือด้วยดาวเทียม (SATELLITE NAVIGATION SYSTEM)ปรากฏการณ์ DOPPLER และระบบ NAVSATระบบ GPSหน้า 9 ระบบหาที่เรือด้วยดาวเทียมอื่นๆระบบแผนที่อิเล็กทรอนิกส์สรุป |
บทนำ
ด้วยเทคโนโลยีอันทันสมัยในปัจจุบัน นักเดินเรือสามารถหาที่เรือกลางทะเลเปิดไกลฝั่งได้อย่างง่ายดายและแม่นยำด้วยการอ่านค่าละติจูดและลองจิจูดจากหน้าจอเครื่อง GPS บนสะพานเดินเรือ นอกจากระบบหาที่เรือด้วยดาวเทียมหรือระบบจีพีเอส (GPS – GLOBAL POSITIONING SYSTEM) แล้ว อุปกรณ์สมัยใหม่อื่นๆ เช่นเข็มทิศไยโร วิทยุสื่อสาร เรดาร์ และเครื่องหยั่งน้ำ ได้ช่วยทำให้การเดินเรือเป็นเรื่องปลอดภัยและ ไม่ยุ่งยากเท่าในอดีต แต่กว่าจะมาถึงความสะดวกสบายและความปลอดภัยในปัจจุบันได้ ศิลป์และศาสตร์แห่งการเดินเรือได้ผ่านประวัติศาสตร์อันยาวนาน การพัฒนาศิลป์และศาสตร์ที่เกี่ยวข้องกับการเดินเรือจากอดีตมาจนถึงปัจจุบันนั้น ประกอบด้วยเหตุการณ์ที่น่าสนใจมากมาย ซึ่งนอกจากจะเป็นเกร็ดความรู้ทางประวัติศาสตร์สำหรับนักเดินเรือแล้ว ยังช่วยเตือนให้นักเดินเรือสมัยใหม่ได้ระลึกถึงอันตรายและความยากลำบากที่มีอยู่คู่กับชีวิตชาวเรือ แม้ว่าเครื่องมือช่วยในการเดินเรือจะถูกพัฒนามากขึ้นเพียงใดก็ตาม
การเดินเรือรายงานและเดินเรือชายฝั่ง
มนุษย์ตระหนักถึงความสำคัญและข้อได้เปรียบเชิงปริมาณของการขนส่งทางน้ำมาตั้งแต่ครั้งอดีตกาล โดยเฉพาะอย่างยิ่งในสมัยที่การขนส่งทางบกยังไม่มีการพัฒนา แต่ถึงแม้ว่าความรู้ทางด้านดาราศาสตร์และแผนที่จะถูกบุกเบิกตั้งแต่สมัยกรีกหลายร้อยปีก่อนคริสตกาล นักเดินเรือ ในสมัยก่อนศตวรรษที่ ๑๒ ยังคงใช้เพียงวิธีการหาที่เรือรายงาน (DEAD RECKONING – DR) และที่เรือชายฝั่งเป็นหลักในการเดินเรือ การเดินเรือในสมัยนั้นมีความเป็นศิลป์มากกว่าศาสตร์เนื่องจากในสมัยนั้นยังไม่มีเครื่องมือต่างๆ ที่เหมาะสม เช่น เข็มทิศแม่เหล็ก เครื่องวัดดาว และนาฬิกาโครโนเมตร และนักเดินเรือต้องใช้การคาดคะเนที่ไม่เที่ยงตรงนัก โดยใช้วิธีการคาดคะเนระยะทางที่เรือเดินทางไปได้จากความเร็วและเวลา และใช้กระแสลม (ซึ่งมีการเปลี่ยนแปลงแน่นอนตามฤดูกาล) หรือการสังเกตดวงอาทิตย์และดาวต่างๆ ในการบอกทิศเมื่อเดินเรือในทะเลเปิดไกลฝั่ง นักเดินเรือในสมัยนั้นจึงไม่สามารถเดินเรือห่างฝั่งได้เป็นระยะเวลานาน
ต่อมาในศตวรรษที่ ๑๒ ชาวยุโรปได้เรียนรู้วิธีการประดิษฐ์เข็มทิศแม่เหล็กจากชาวจีน และเริ่มนำเข็มทิศแม่เหล็กมาใช้อย่างแพร่หลายในการเดินเรือ ประกอบกับเทคนิคการหาที่เรือรายงานได้ถูกพัฒนาขึ้นโดยการโยนวัตถุลอยน้ำลงข้างกราบและสังเกตความเร็วที่เรือเคลื่อนที่ผ่านระหว่างจุด ที่ทำเครื่องหมายสองจุดบนเรือ และต่อมาได้พัฒนาขึ้นเป็นการโยนท่อนไม้ที่ผูกเชือกเป็นปมลง ท้ายเรือ และนับจำนวนปมเชือกที่ปล่อยออกไปขณะใช้นาฬิกาทรายจับเวลา ซึ่งวิธีนี้เป็นที่มาของ การนับหน่วยความเร็วเรือเป็นนอต (knot – ปมเชือก)
ยุคแรกเริ่มของการเดินเรือดาราศาสตร์
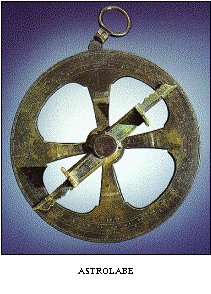
หลักการของเส้นตำบลที่ท้องฟ้า (CELESTIAL LINE OF POSITION) ในเทคนิคการเดินเรือดาราศาสตร์สมัยใหม่ถูกค้นพบโดยบังเอิญในปี ค.ศ.๑๘๓๗ แต่ยุคแรกเริ่มของการเดินเรือดาราศาสตร์เกิดขึ้นพร้อมกับความรู้ทางคณิตศาสตร์และวิทยาการในยุคฟื้นฟูศิลปะวิทยา หรือยุคเรเนซอง (RENAISSANCE) ในศตวรรษที่ ๑๔ ในยุคนี้ได้เกิดความแพร่หลายของอุปกรณ์ในการวัดดาวแบบต่างๆ เช่น ASTROLABE และ QUADRANT ซึ่งการเดินเรือดาราศาสตร์ในสมัยนั้นนักเดินเรือจะใช้เครื่องมือเหล่านี้ในการคำนวนหาละติจูด โดยนำเรือให้อยู่บนละติจูดของเมืองท่าหรือเกาะที่ต้องการไปถึง จากนั้นจะถือเข็มตะวันตกหรือตะวันออกในทิศทางของเมืองท่าหรือเกาะไปเรื่อยๆ จนถึงเมืองท่าหรือเกาะนั้น
การหาละติจูดในซีกโลกเหนือเป็นสิ่งที่ทำได้ไม่ยากนักด้วยการวัดมุมสูงของดาวเหนือ (POLARIS) ดาวเหนือจะอยู่ที่ประมาณขอบฟ้าที่ละติจูด ๐ องศา (เส้นศูนย์สูตร) และอยู่เกือบตรงศีรษะที่ละติจูด ๙๐ องศาเหนือ (ขั้วโลกเหนือ) มุมสูงของดาวเหนือจึงใช้บอกละติจูดอย่างคร่าวๆ ได้
ส่วนในซีกโลกใต้ซึ่งมองไม่เห็นดาวเหนือ และไม่สามารถหาละติจูดด้วยวิธีดังกล่าวได้ นักเดินเรือจึงต้องหาวิธีใหม่ในการหาละติจูดโดยไม่ใช้ดาวเหนือ ในช่วงศตวรรษที่ ๑๔ – ๑๕ ซึ่งเป็นช่วงขยายตัวของการค้าขายระหว่างยุโรปกับเอเชีย ชาวโปรตุเกสได้คิดค้นวิธีหาละติจูดโดยไม่ใช้ดาวเหนือ ด้วยการวัดมุมสูงของดวงอาทิตย์ ขณะที่ดวงอาทิตย์กำลังผ่านเมอริเดียนที่มุมสูงสุด (MERIDIAN TRANSIT หรือ LOCAL APPARENT NOON) ซึ่งขณะนั้นดวงอาทิตย์จะอยู่ตรงทิศเหนือหรือใต้ของผู้ตรวจพอดี ผู้ตรวจสามารถคำนวณหาค่าละติจูดได้โดยใช้มุมสูงของดวงอาทิตย์ที่วัดได้ หากดวงอาทิตย์อยู่ตรงเส้นศูนย์สูตรตลอดเวลา การหาค่าละติจูดจะสามารถทำได้ด้วยวิธีคล้ายกับการหาละติจูดด้วยดาวเหนือ (ดวงอาทิตย์จะอยู่ตรงศีรษะที่เส้นศูนย์สูตร และอยู่ตรงขอบฟ้าที่ขั้วโลก) แต่เนื่องจากแกนหมุนของโลกเอียงและดวงอาทิตย์ไม่ได้อยู่ตรงเส้นศูนย์สูตร การหาละติจูดด้วยวิธีนี้จึงต้องแก้ค่ามุมของดวงอาทิตย์จากเส้นศูนย์สูตร (ค่า DECLINATION)

นศตวรรษที่ ๑๒ – ๑๓ ซึ่งเป็นช่วงปลายยุคมืด ชาวยุโรปได้รู้จักกับเครื่องมือวัดมุมสูงของวัตถุท้องฟ้าเรียกว่า ASTROLABE จากชาวมุสลิมในระหว่างการขยายอำนาจของอาณาจักรอิสลามในยุโรป ส่วนประกอบหลักของเครื่อง ASTROLABE ประกอบด้วยแผ่นกลมหรือวงแหวนที่ทำเครื่องหมายขนาดมุมไว้โดยรอบ และแขนที่หมุนรอบศูนย์กลางของวงแหวนสำหรับใช้วัดมุมสูงของวัตถุท้องฟ้า เมื่อผู้ใช้เล็งปลายแขนทั้งสองข้างกับวัตถุท้องฟ้าก็จะสามารถอ่านค่ามุมได้จากเครื่องหมายขนาดมุมบนวงแหวนที่ปลายแขนชี้ โดยเวลาใช้งานจะแขวนตัววงแหวนไว้เพื่ออาศัยแรงโน้มถ่วงของโลกถ่วงเครื่อง ASTROLBE ให้ได้มุมตั้งตรงกับพื้นโลกตลอดเวลา

เครื่องมือวัดมุมสูงของวัตถุท้องฟ้าอีกแบบหนึ่งที่เริ่มมีใช้ในช่วงศตวรรษที่ ๑๓ คือ QUADRANT ซึ่งเป็นเครื่องวัดมุมสูงอย่างง่ายที่อาศัยแรงโน้มถ่วงของโลกเช่นเดียวกับ ASTROLABE โดย QUADRANT ประกอบด้วยแผ่นหนึ่งในสี่ของวงกลม (ชื่อ QUADRANT แปลว่าหนึ่งในสี่) ที่ทำเครื่องหมายขนาดมุมตามส่วนโค้ง และน้ำหนักถ่วงผูกอยู่กับมุมของแผ่นหนึ่งในสี่วงกลม ผู้ใช้ QUADRANT วัดมุมสูงของวัตถุท้องฟ้าโดยการเล็งด้านข้างของ QUADRANT กับดาวที่ต้องการวัด และอ่านค่ามุมจากเครื่องหมายบนด้านโค้งที่ตรงกับเชือกผูกน้ำหนัก
การที่ ASTROLABE และ QUADRANT ต้องอาศัยน้ำหนักและแรงโน้มถ่วงของโลกในการวัดมุม ทำให้เกิดความคลาดเคลื่อนในการวัดเมื่อมีการเคลื่อนไหว เช่น บนเรือที่โคลง (เครื่องมือทั้งสองแบบถูกใช้โดยนักดาราศาสตร์บนบกเป็นหลัก) และยังไม่มีการคิดประดิษฐ์เครื่องมือวัดมุมสูงของวัตถุท้องฟ้าที่เหมาะกับการใช้ในเรือไปอีกเกือบร้อยปี การเดินเรือรายงานจึงยังคงเป็นวิธีหลักในการเดินเรือห่างฝั่ง และใช้การเดินเรือดาราศาสตร์ประกอบเพื่อหาละติจูด
จะเห็นได้ว่า การเดินเรือในสมัยศตวรรษที่ ๑๒ – ๑๕ เริ่มมีความเป็นศาสตร์ขึ้นมาบ้าง แต่ก็ยังมีความเป็นศิลป์มากกว่าศาสตร์เนื่องจากขาดอุปกรณ์ที่เที่ยงตรง แต่ด้วยความต้องการเครื่องเทศและสินค้าจากเอเชีย การขยายอำนาจทางเศรษฐกิจและการเผยแผ่ศาสนาคริสต์ ทำให้มีนักเดินเรือจำนวนมากออกเดินทางเพื่อสำรวจและค้นหาเส้นทางใหม่ๆ และในยุคนี้ก็ได้มีเหตุการณ์สำคัญทางประวัติศาสตร์ของการเดินเรืออยู่สองเหตุการณ์ที่เกิดขึ้นไล่เลี่ยกัน นั่นคือการเดินเรือข้ามมหาสมุทรแอตแลนติก และการเดินเรือรอบโลกเป็นครั้งแรก
การค้นพบโลกใหม่ และการเดินทางรอบโลก
ในปลายศตวรรษที่ ๑๕ นักเดินเรือในโปรตุเกสชื่อคริสโตเฟอร์ โคลัมบัส ได้คิดแผนการที่จะออกเดินทางค้นหาเส้นทางไปยังทวีปเอเชียโดยการข้ามมหาสมุทรแอตแลนติก แทนการอ้อมใต้ทวีปแอฟริกา ซึ่งเป็นเส้นทางปกติในสมัยนั้น โดยโคลัมบัสคำนวณระยะทางไปยังเอเชียได้ประมาณ ๓,๐๐๐ ไมล์ จากการรวบรวมข้อมูลเกี่ยวกับภูมิศาสตร์และขนาดเส้นผ่าศูนย์กลางโลกจากตำราสมัยกรีก ประกอบกับข้อมูลขนาดของทวีปเอเชียจากบันทึกสมัยปลายศตวรรษที่ ๑๓ ของมาร์โค โปโล โคลัมบัสได้เสนอแผนดังกล่าวต่อกษัตริย์จอห์นที่สองแห่งโปรตุเกสเพื่อขอรับทุนสนับสนุน แต่กษัตริย์จอห์นที่สองไม่สนใจแผนของโคลัมบัส หลายปีต่อมาโคลัมบัสเดินทางไปยังเสปนและได้เสนอแผนการค้นหาเส้นทางไปยังเอเชียต่อราชินี ISABELLA และกษัตริย์ FERDINAND ใน ครั้งนี้แผนของโคลัมบัสได้รับการสนับสนุน (หลังจากที่เกือบจะถูกปฏิเสธ) โคลัมบัสออกเดินทางจากเสปน ในปลายปี ค.ศ.๑๔๙๒ (พ.ศ.๒๐๓๕ – ตรงกับสมัยสมเด็จพระรามาธิบดีที่ ๒ ในช่วงอยุธยาตอนต้น) ใช้เวลาเดินทางข้ามมหาสมุทรแอตแลนติกกว่า ๒ เดือน เป็นระยะทางกว่า ๔,๐๐๐ ไมล์ ซึ่งเกินกว่าระยะทางที่โคลัมบัสได้คำนวณไว้ล่วงหน้า แต่ที่จริงแล้วเขายังไปได้ไม่ถึงครึ่งของเส้นทางสู่เอเชียด้วยซ้ำ โคลัมบัสใช้วิธีเดินเรือรายงานเป็นหลัก (เช่นเดียวกับนักเดินเรือส่วนมากในสมัยนั้น) โดยเครื่องมือเดินเรือที่ โคลัมบัสใช้เป็นหลักคือเข็มทิศแม่เหล็ก และนาฬิกาทราย โดยถือเข็มไปทางตะวันตกและหาที่เรือรายงานจากการคำนวณความเร็วเรือทุกชั่วโมงด้วยนาฬิกาทราย จากหลักฐานปูมเรือเดินของโคลัมบัส โคลัมบัสได้ใช้ ASTROLABE เพื่อพยายามหาละติจูดอยู่สามถึงสี่ครั้งตลอดการเดินทาง แต่ผลออกมาไม่เป็นที่น่าพอใจนัก โคลัมบัสจึงไม่ได้หาที่เรือ ดาราศาสตร์อีกเลย โคลัมบัสเดินทางมาถึงหมู่เกาะบาฮามาส์ (ซึ่งเขาเรียกว่าหมู่เกาะอินเดียตะวันตก) ทางตะวันออกของคิวบาในปัจจุบัน และทำการสำรวจอยู่เกือบสามเดือน ในระหว่างการสำรวจเขาเสียเรือไป ๑ ลำ จากการเกยหินโสโครก จากนั้นจึงออกเดินทางกลับเสปนในเดือนมกราคมของปี ค.ศ.๑๔๙๓ ใช้เวลาเดินทางขากลับเกือบสองเดือน

ถึงแม้โคลัมบัสจะไม่พบเส้นทางไปยังทวีปเอเชีย การค้นพบแผ่นดินทางตะวันตกของมหาสมุทรแอตแลนติกทำให้มีนักเดินเรือ และนักสำรวจจำนวนมากเดินทางข้ามมหาสมุทร แอตแลนติกเพื่อสำรวจโลกใหม่และค้นหาเส้นทางไปยังทวีปเอเชียผ่านโลกใหม่ หนึ่งในนั้นคือนักเดินเรือชาวโปรตุเกส ชื่อเฟอร์ดินาน แมเจลแลน (FERDINAND MAGELLAN) ๒๕ ปีหลังจากการข้ามมหาสมุทรแอตแลนติกของโคลัมบัส หรือในปี ค.ศ.๑๕๑๗ (พ.ศ. ๒๐๖๐ – ยังคงอยู่ในสมัยสมเด็จพระรามาธิบดีที่ ๒) แมเจลแลนเสนอแผนการที่จะค้นหาเส้นทางลัดไปยังทวีปเอเชียโดยอ้อมทางใต้ของโลกใหม่ (หรือทวีปอเมริกาใต้ในปัจจุบัน) ต่อกษัตริย์ชารลส์ที่หนึ่ง (CHARLES I) แห่งเสปน โดยแมเจลแลนคาดการณ์ว่าเมื่อเดินทางอ้อมใต้โลกใหม่ไปแล้วเขาสามารถเดินทางไปถึงหมู่เกาะ เครื่องเทศ ซึ่งเป็นประเทศอินโดนีเซียในปัจจุบันได้ภายในเวลาไม่กี่สัปดาห์ แผนการเดินทางของแมแจลแลนเป็นที่สนใจของกษัตริย์เสปนเป็นอย่างมาก เนื่องจากในขณะนั้นโปรตุเกสกำลังควบคุมเส้นทางเดินเรือไปยังเอเชียผ่านทางทวีปแอฟริกา เสปนจึงต้องการเส้นทางไปยังเอเชียของ ตนเอง และกษัตริย์ชารลส์ที่หนึ่ง ได้มอบเรือจำนวน ๕ ลำ พร้อม

แมเจลแลนออกเดินทางจากเสปนในปลายปี ค.ศ.๑๕๑๙ แต่การค้นหาเส้นทางผ่าน แผ่นดินใหญ่ (แมเจลแลนนำเรือหลงเข้าไปในแม่น้ำและอ่าวปิดหลายครั้ง) และความหนาวเย็นของทะเลใกล้ขั้วโลกใต้ ทำให้แมเจลแลนเสียเวลาจนถึงปลายปี ค.ศ.๑๕๒๐ กว่าจะผ่านช่องแคบ (ซึ่ง ต่อมาตั้งชื่อว่าช่องแคบแมเจลแลน เพื่อเป็นเกียรติแก่ผู้ค้นพบ) ออกสู่มหาสมุทรแปซิฟิก ซึ่งในระหว่างการเดินทางในช่วงต้นนั้นแมเจลแลนเสียเรือไป ๒ ลำ หลังจากที่ผ่านปลายใต้สุดของทวีปอเมริกาใต้ แมเจลแลนเดินทางร่วมสองเดือนโดยไม่เห็นฝั่งหรือเกาะเลย การที่แมเจลแลนใช้เวลาข้ามมหาสมุทรแปซิฟิกนานกว่าที่ประมาณไว้มากทำให้ปริมาณอาหารและน้ำจืดไม่เพียงพอ ในระหว่างนี้แมเจลแลนสูญเสียลูกเรือไปอีก ๑๙ คน ในเดือนมีนาคม ค.ศ.๑๕๒๑ แมเจลแลนเดินทางมาถึง หมู่เกาะซึ่งเป็นประเทศฟิลิปปินส์ในปัจจุบัน ใช้เวลาข้ามมหาสมุทรแปซิฟิกทั้งหมดกว่าสามเดือน
แมเจลแลนเสียชีวิตลงที่ฟิลิปปินส์จากการเข้าไปเกี่ยวข้องกับความขัดแย้งระหว่างคน พื้นเมือง แต่ถึงแม้จะเสียผู้นำใหญ่ไป ลูกเรือทั้งหมดก็รู้ว่าตนได้เดินทางมาถึงเอเชียแล้ว จึงได้เดินทางต่อไปยังหมู่เกาะเครื่องเทศ (อินโดนีเซียในปัจจุบัน) ก่อนที่จะกลับเสปนตามแผนเดิมของแมเจลแลนด้วยลูกเรือที่เหลืออยู่ ๑๑๕ คน กับเรือ ๒ ลำ (เรือลำที่สามถูกเผาทิ้งเนื่องจากจำนวนคนไม่พอที่จะเดินเรือทั้งสามลำ) ภายใต้การนำของ เซบาสเตียน เดลคาโน เมื่อถึงหมู่เกาะเครื่องเทศแล้ว เดลคาโนตัดสินใจที่จะแยกเรือทั้งสองลำ โดยให้ลำหนึ่งเดินทางต่อไปยังเสปนผ่านทวีปแอฟริกา ส่วนอีกลำเดินทางกลับทางเดิมผ่านทวีปอเมริกาใต้ ในที่สุดจากเรือทั้งหมด ๕ ลำ กับลูกเรือกว่า ๒๐๐ คน มีเพียงเรือ ๑ ลำ (ลำที่เดลคาโนนำผ่านทวีปแอฟริกา) กับลูกเรือ ๑๘ คนที่รอดกลับไปถึงเสปนได้ในเดือนกันยายน ค.ศ.๑๕๒๒ รวมเวลาเดินทางทั้งสิ้นเกือบ ๓ ปี
การพัฒนาเครื่องมือเดินเรือดาราศาสตร์รุ่นต่อมา
เครื่องมือเดินเรือดาราศาสตร์ในยุคของโคลัมบัสและแมเจลแลนต้องอาศัยแรงโน้มถ่วงของโลกในการวัดมุมสูงของวัตถุท้องฟ้า จึงทำให้การวัดมุมบนเรือที่โคลงทำได้ไม่เที่ยงตรงนัก อย่างไรก็ดี นักดาราศาสตร์บนบกได้คิดค้นเครื่องมือวัดดาวที่ไม่ต้องอาศัยแรงโน้มถ่วงของโลกได้หลายสิบปีก่อนการเดินทางของโคลัมบัส เครื่องมือดังกล่าวคือ CROSS STAFF ซึ่งใช้หลักการตรีโกณในการวัดมุมระหว่างดาวสองดวง หรือระหว่างดาวกับขอบฟ้า โดย CROSS STAFF ประกอบด้วยไม้สองชิ้นวางเป็นมุมตั้งฉาก ไม้ชิ้นสั้นเป็นแขนหรือฐานของสามเหลี่ยมด้านเท่า และไม้ชิ้นยาวเป็นแกนหรือความสูงของสามเหลี่ยม ซึ่งทำเครื่องหมายบอกมุมไว้ตามความยาวของแกน CROSS STAFF ใช้วัดมุมระหว่าง ดาวสองดวงหรือมุมสูงของดาวโดยการเล็งแกนไปที่ตรงกลางระหว่างดาวสองดวง หรือระหว่างดาวกับขอบฟ้า แล้วเลื่อนแขนไปจนกว่าจุด สองจุดที่ต้องการวัดอยู่ตรงปลายแขนทั้งสองข้าง และอ่านค่ามุมจากตำแหน่งของแขนบนแกน


กว่าจะมาเป็นแผนที่เดินเรือยุคใหม่
จนกระทั่งในยุค เรเนซอง ความรู้ต่างๆ ในสมัยกรีกได้ถูกฟื้นฟูขึ้นอีกครั้ง ในสมัยนั้นชาวโปรตุเกสมีชื่อเสียงทางด้านการทำแผนที่ แต่แผนที่ในยุคนั้นยังมีปัญหาในการแสดงพื้นผิวทรงกลมลงบนระนาบแผ่นกระดาษ จนกระทั่งในปี ค.ศ.๑๕๖๙ (เกือบ ๕๐ ปีหลังจากการเดินทางรอบโลกของแมเจลแลน – ตรงกับช่วงเสียกรุงศรีอยุธยาครั้งที่หนึ่ง) เจอร์ราด เครเมอร์ (GERRARD KREMER) หรือเจอร์ราด เมอร์เคเตอร์ (GERARD MERCATOR) ได้คิดค้นการฉายภาพจากทรงกลมลงบนพื้นราบ โดยวิธีการฉายภาพดังกล่าวแสดงเส้นเกลียว (RHUMB LINE) เป็นเส้นตรงบนแผนที่ ซึ่งเป็นประโยชน์อย่างมากในการเดินเรือ ถึงแม้ว่าเส้นเกลียวจะมีระยะทางมากกว่าเส้นวงใหญ่ (GREAT CIRCLE) แต่การเดินเรือตามเส้นเกลียวทำได้ง่ายกว่าด้วยการถือเข็มคงที่ จึงเหมาะสำหรับการนำเรือด้วยเข็มทิศ (เส้นเกลียวคือเส้นที่ทำมุมคงที่กับเส้นละติจูดและลองจิจูด และจะวนเป็นเกลียวเข้าไปหาขั้วโลก) แผนที่แบบนี้เรียกว่าแผนที่เมอร์เคเตอร์ (MERCATOR PROJECTION) ซึ่งยังคงใช้เป็นแผนที่เดินเรืออยู่ในปัจจุบัน


กล้องส่องทางไกลและเซ็กส์แตนท์
ช่วงศตวรรษที่ ๑๗-๑๘ นับได้ว่าเป็นยุคทองของการพัฒนาทางฟิสิกส์ ดาราศาสตร์ และวิทยาศาสตร์ ผลงานของนักวิทยาศาสตร์และนักดาราศาสตร์เช่น กาลิเลโอ (GALILEO GALILEI), เคปเลอร์ (JOHANNES KEPLER), เดคารต์ (RENE’ DESCARTES) และนิวตัน (ISAAC NEWTON) ทำให้การพัฒนาเครื่องมือเดินเรือในยุคนี้เป็นไปอย่างรวดเร็ว

ในปี ค.ศ.๑๖๐๘ (พ.ศ.๒๑๕๑ – สมัยสมเด็จ พระเอกาทศรถ) ช่างทำแว่นชาวเนเธอร์แลนด์ชื่อ HANS LIPPERHY ได้ยื่นขอจดทะเบียนลิขสิทธิ์กล้องส่องทางไกลแบบหักเหด้วยการประกอบเลนส์นูน (CONVEX LENSE) และเลนส์เว้า (CONCAVE LENSE) เข้าด้วยกันในกระบอก แต่ LIPPERHY ไม่ได้รับลิขสิทธิ์ เนื่องจากมีผู้อ้างว่าตนเป็นคนคิดประดิษฐ์กล้องส่องทางไกลหลายคนในเวลาไล่เลี่ยกัน ความไม่ยุ่งยากซับซ้อนในการผลิตทำให้กล้องส่องทางไกลแพร่กระจายไปทั่วยุโรปภายในเวลาไม่ถึงหนึ่งปี ต่อมาในปี ค.ศ.๑๖๐๙ กาลิเลโอ ได้ประดิษฐ์กล้องส่องทางไกลกำลังสูง (กล้องโทรทัศน์) ขึ้น กาลิเลโอใช้กล้องดังกล่าวส่องดูวัตถุท้องฟ้าและเขียนบรรยายภาพพื้นผิวดวงจันทร์และอธิบายการค้นพบดวงจันทร์ของดาวพฤหัสเป็นคนแรก ในปี ค.ศ.๑๖๑๑ เคปเลอร์ได้แสดงให้เห็นว่าสามารถใช้เลนส์นูนสองชิ้นประกอบกันเป็นกล้องส่องทางไกลได้ อย่างไรก็ดี การพัฒนากล้องส่องทางไกลและกล้องโทรทัศน์แบบหักเหได้มาถึงทางตันในอีกไม่กี่ปีต่อมาเนื่องจากปัญหาของการเกิดปรากฏการณ์ ABERRATION (ปรากฏการณ์ที่แสงที่มีความยาวคลื่นไม่เท่ากันทำมุมหักเหผ่านตัวกลางไม่เท่ากัน ซึ่งเป็นหลักการเดียวกันกับการใช้ปริซึมแยกแสงออกเป็นสีรุ้ง) ทำให้ต้องใช้เลนส์ที่มีความยาวโฟกัสสูงเพื่อลดปัญหาปรากฏการณ์ ABERRATION แต่การใช้เลนส์ที่มีความยาวโฟกัสสูงทำให้ตัวกล้องมีขนาดความยาวมากไปด้วย ต่อมาเดคารต์ได้ใช้กฎของสเนล (WILLEBRORD SNELL) ว่าด้วยการหักเหของแสงและดัชนีหักเห อธิบายปรากฏการณ์ ABERRATION ในกล้องโทรทัศน์แบบหักเหและเสนอวิธีแก้ไขด้วยการใช้เลนส์ที่มีส่วนโค้งแบบไฮเปอร์บอลิคแทนที่เลนส์ที่มีส่วนโค้งแบบทรงกลม แต่นักทำเลนส์ในสมัยนั้นยังไม่มีความสามารถในการผลิตเลนส์แบบไฮเปอร์บอลิคได้ จนกระทั่งในปี ค.ศ.๑๖๗๒ (พ.ศ.๒๒๑๕ – ตรงกับสมัยสมเด็จพระนารายณ์) นิวตันได้ตีพิมพ์ผลงานว่าด้วยสเปกตรัมและการหักเหของแสง และสร้างกล้องโทรทัศน์แบบสะท้อน โดยใช้กระจกสะท้อนสองชิ้น (DOUBLE REFLECTING MIRROR) ประกอบด้วยกระจกโค้งที่ปลายกล้องทำหน้าที่สะท้อนแสงเข้าสู่กระจกเรียบขนาดเล็ก ซึ่งช่วยแก้ปัญหา ABERRATION ในกล้องโทรทัศน์แบบหักเหได้


หลักการใช้กระจกสะท้อนสองชิ้นหรือ DOUBLE REFLECTING MIRROR ของนิวตันนอกจากจะแก้ปัญหาของกล้องโทรทัศน์แบบหักเหได้แล้ว ยังเป็นประโยชน์ต่อการพัฒนา เซ็กส์แตนท์หรือเครื่องวัดดาวในปัจจุบัน ในปี ค.ศ.๑๗๓๑ (พ.ศ.๒๒๗๔ – ตรงกับสมัยสมเด็จ พระเจ้าอยู่หัวท้ายสระในช่วงอยุธยาตอนปลาย) นักคณิตศาสตร์ชาวอังกฤษชื่อ จอห์น ฮาดลีย์ (JOHN HADLEY) ได้ประยุกต์หลักการ DOUBLE REFLECTING MIRROR ของนิวตันมาประดิษฐ์เครื่องวัดดาว OCTANT โดย HADLEY ใช้หลักที่ว่ากระจกสะท้อนสองชิ้นมีขนาดเป็นครึ่งหนึ่งของมุมระหว่างวัตถุสองชิ้นที่สะท้อนผ่านกระจกนั้น สร้างเครื่องวัดดาว OCTANT ที่มีขนาดมุมเพียง ๔๕ องศา (หรือหนึ่งในแปดของ วงกลม – OCTANT แปลว่าหนึ่งในแปด) แต่สามารถวัดมุมได้ถึง ๙๐ องศา หรือเท่ากับ QUADRANT และในปีเดียวกัน ทอมัส กอดเฟรย์ (THOMAS GODFREY) ชาวอเมริกันได้ประดิษฐ์เครื่องวัดดาวที่สามารถวัดมุมได้ถึง ๑๘๐ องศา โดยใช้หลักการ DOUBLE REFLECTING MIRROR เช่นเดียวกัน แต่เครื่องวัดดาวของ GODFREY ไม่เป็นที่นิยมเท่าของ HAHADLEY เนื่องจากมีขนาดใหญ่เทอะทะและมีน้ำหนักมาก


ต่อมาในปี ค.ศ.๑๗๕๗ จอห์น เบิร์ด (JOHN BIRD) ชาวอังกฤษ ได้ปรับปรุงเครื่องวัดดาว OCTANT โดยขยายขนาดมุมออกเป็น ๖๐ องศา (หรือหนึ่งในหกของวงกลม) ให้สามารถวัดมุมได้ถึง ๑๒๐ องศา เพื่อใช้วัดมุมระหว่างดวงจันทร์กับดาวฤกษ์หรือดาวเคราะห์อื่นๆ ในวิธีการหาลองจิจูดด้วยวิธี LUNAR DISTANCE (ซึ่งจะกล่าวถึงในหัวข้อต่อไป) เครื่องมือวัดดาวแบบของเบิร์ดก็คือต้นแบบของเซ็กส์แตนท์แบบที่มีใช้ในปัจจุบันนั่นเอง (เซ็กส์แตนท์แปลว่าหนึ่งในหก) ต่อมาถึงแม้ว่า เซ็กส์แตนท์ในปัจจุบันจะมีขนาดมุมมากกว่า ๖๐ องศา เพื่อให้สามารถวัดมุมได้กว้างขึ้น ชื่อเซ็กส์แตนท์ก็ยังคงใช้เรียกเครื่องมือวัดดาวแบบนี้อยู่
จะเห็นได้ว่า การเดินเรือในสมัยศตวรรษที่ ๑๒ – ๑๕ เริ่มมีความเป็นศาสตร์ขึ้นมาบ้าง แต่ก็ยังมีความเป็นศิลป์มากกว่าศาสตร์เนื่องจากขาดอุปกรณ์ที่เที่ยงตรง แต่ด้วยความต้องการเครื่องเทศและสินค้าจากเอเชีย การขยายอำนาจทางเศรษฐกิจและการเผยแผ่ศาสนาคริสต์ ทำให้มีนักเดินเรือจำนวนมากออกเดินทางเพื่อสำรวจและค้นหาเส้นทางใหม่ๆ และในยุคนี้ก็ได้มีเหตุการณ์สำคัญทางประวัติศาสตร์ของการเดินเรืออยู่สองเหตุการณ์ที่เกิดขึ้นไล่เลี่ยกัน นั่นคือการเดินเรือข้ามมหาสมุทรแอตแลนติก และการเดินเรือรอบโลกเป็นครั้งแรก
การหาลองจิจูดในทะเล
เนักเดินเรือรู้จักวิธีหาละติจูดในทะเลโดยการวัดมุมสูงของดาวเหนือและดวงอาทิตย์ (หรือดาวฤกษ์ที่ทราบ DECLINATION) มานานนับพันปี แต่ก็ยังไม่มีเครื่องมือและวิธีการที่เหมาะสมสำหรับการวัดลองจิจูดในทะเลได้จนถึงศตวรรษที่ ๑๘ การหาละติจูดทำได้ไม่ยากนักเนื่องจากมุมสูงของดาวที่ใช้หาละติจูดไม่ขึ้นอยู่กับเวลาที่ทำการวัด แต่การหาลองจิจูดจำเป็นต้องใช้เวลามาตรฐานเข้ามาเกี่ยวข้อง เนื่องจากตำแหน่งของดาว ณ เวลาท้องถิ่น ๑๙๐๐ ที่ลองจิจูด ๑๐๐ องศา นั้นไม่ต่างจากตำแหน่งของดาว ณ เวลาท้องถิ่น ๑๙๐๐ ที่ลองจิจูดใดๆ วิธีการหนึ่งที่สามารถใช้หาลองจิจูดได้ คือการเทียบเวลาท้องถิ่นที่หาได้กับเวลามาตรฐาน (เช่น GMT) เนื่องจากใน ๑ วัน หรือ ๒๔ ชั่วโมง โลกหมุนรอบตัวเองได้ ๓๖๐ องศา ส่วนต่างของเวลาที่หาได้ ๑ ชั่วโมง จึงเท่ากับส่วนต่างของลองจิจูด ๑๕ องศา
อย่างไรก็ดี ในช่วงปลายศตวรรษที่ ๑๗ ถึงต้นศตวรรษที่ ๑๘ ยังไม่มีผู้ประดิษฐ์นาฬิกาที่สามารถเดินได้เที่ยงตรงบนเรือที่โคลง เนื่องจากในสมัยนั้นมีแต่นาฬิกาลูกตุ้มซึ่งใช้แรงโน้มถ่วงของโลกในการแกว่งลูกตุ้ม และการโคลงของเรือทำให้อัตราการแกว่งของลูกตุ้มไม่คงที่ ในยุคนี้นัก ดาราศาสตร์และนักคณิตศาสตร์จึงได้พยายามคิดค้นวิธีหาละติจูดในทะเลโดยไม่ต้องใช้นาฬิกาเทียบเวลามาตรฐาน วิธีหนึ่งที่ใช้หาลองจิจูดได้โดยไม่ใช้นาฬิกาเทียบเวลามาตรฐานคือวิธี LUNAR DISTANCE ซึ่งใช้การวัดมุมระหว่างดวงจันทร์กับดวงอาทิตย์หรือวัตถุท้องฟ้าอื่นๆ แต่วิธีนี้ต้องใช้การคำนวณที่ค่อนข้างซับซ้อน และความคลาดเคลื่อนเพียงเล็กน้อยในการวัดมุมอาจทำให้ตำบลที่ผิดไปหลายสิบไมล์ วิธีนี้จึงไม่เป็นที่นิยมนัก และในปี ค.ศ.๑๙๐๗ ปฏิทินเดินเรือ (NAUTICAL ALMANAC) ก็ได้หยุดการตีพิมพ์ตารางสำหรับคำนวณหาลองจิจูดด้วยวิธี LUNAR DISTANCE
ในระหว่างปี ค.ศ.๑๖๙๐ – ๑๗๐๗ ราชนาวีอังกฤษได้เสียเรือไปหลายลำจากความ คลาดเคลื่อนในการหาตำบลที่เรือ เป็นเหตุให้ทางรัฐบาลต้องการหาวิธีวัดหรือคำนวณลองจิจูดในทะเลสำหรับนักเดินเรือโดยเร็ว (ฝรั่งเศสและเสปนก็กำลังพยายามหาวิธีคำนวณลองจิจูดอยู่เช่นกัน) และในปี ค.ศ.๑๗๑๔ (พ.ศ.๒๒๕๗ – ตรงกับสมัยสมเด็จพระเจ้าอยู่หัวท้ายสระในช่วงอยุธยา ตอนปลาย) รัฐบาลอังกฤษได้เสนอรางวัลถึง ๒๐,๐๐๐ ปอนด์ ให้กับผู้ที่สามารถคิดวิธีหาลองจิจูดได้ด้วยความแม่นยำภายใน ๓๐ ลิปดา (เทียบเท่าเวลาคลาดเคลื่อนไม่เกิน ๒ นาที) โดยวิธีดังกล่าวจะต้องเหมาะสมกับการใช้งานในทะเล

ทั้งนักคณิตศาสตร์และนักดาราศาสตร์ต่างก็พยายามคิดค้นวิธีหาลองจิจูดเป็นเวลานับสิบปีเพื่อหวังเอาชนะเงินรางวัล ๒๐,๐๐๐ ปอนด์ แต่ก็ไม่ประสบความสำเร็จ จนกระทั่งหลายคนเชื่อว่าการหาลองจิจูดในทะเลอย่างแม่นยำเป็นสิ่งที่เป็นไปไม่ได้ แต่ในที่สุดก็มีช่างทำนาฬิกาชาวอังกฤษชื่อ จอห์น แฮริสัน (JOHN HARRISON) ได้เสนอที่จะสร้างนาฬิกาที่สามารถเดินได้อย่างเที่ยงตรงบนเรือเพื่อใช้รักษาเวลามาตรฐานสำหรับเทียบเวลาหาลองจิจูด แฮริสันได้รับการศึกษาเพียงแค่จากการฝึกงานทำนาฬิกาจากบิดา แต่ด้วยความคิดริเริ่ม ความพยายาม และความชำนาญในวิชาชีพทำให้เขาสามารถแก้ปัญหาลองจิจูดได้สำเร็จ แฮริสันสร้างนาฬิกาลูกตุ้มแบบตั้งพื้นได้ตั้งแต่อายุ ๒๐ ปี และเขาสามารถแก้ปัญหาการยืดและหดตัวของก้านลูกตุ้มนาฬิกาตามอุณหภูมิด้วยการประดิษฐ์ก้านลูกตุ้มผสมทำด้วยเหล็กและทองเหลืองได้เมื่ออายุ ๓๔ ปี ต่อมาในปี ค.ศ.๑๗๓๕ (พ.ศ.๒๒๗๘ – ตรงกับสมัยสมเด็จพระเจ้าบรมโกศในช่วงอยุธยาตอนปลาย) แฮริสันได้นำนาฬิกาเรือนแรก ชื่อว่า H1 มาเสนอต่อคณะกรรมการ BOARD OF LONGITUDE โดยแฮริสันใช้เวลาสร้าง H1 นานถึง ๕ ปี ในการสร้างนาฬิกา H1 แฮริสันแก้ปัญหาแรงโน้มถ่วงกับอาการโคลงของเรือด้วยการใช้ ลูกตุ้มสองชุดและใช้สปริงในการควบคุมอัตราการแกว่งของลูกตุ้ม
ในปี ค.ศ.๑๗๓๖ แฮริสันได้นำนาฬิกา H1 ไปทดลองบนเรือ HMS CENTURION และเรือ HMS ORFORD ซึ่งผลการทดลองออกมาเป็นที่น่าพอใจ แต่แฮริสันเห็นว่ายังสามารถพัฒนาต่อไปได้อีก ในปีต่อมาเขาจึงได้ขอรับเงินสนับสนุนจากคณะกรรมการ BOARD OF LONGITUDE เพื่อสร้างนาฬิกาเรือนที่สองให้เสร็จภายในสองปี โดยจะแก้ไขข้อบกพร่องของ H1 ให้เดินได้เที่ยงตรงมากขึ้นและมีขนาดเล็กลง

แฮริสันใช้เวลาเกือบสามปี ในการสร้าง นาฬิกาเรือนที่สอง (หรือ H2) ซึ่งใช้หลักการทำงานเดียวกับ H1 แต่มีขนาดใหญ่และหนักกว่า ความเที่ยงตรงของ H2 ยังไม่เป็นที่พอใจของแฮริสัน เนื่องจากการแกว่งของลูกตุ้มยังได้รับผลกระทบจากอาการโคลงของเรือ เขาจึงได้ใช้เวลาอีกเกือบ ๒๐ ปี เพื่อสร้าง H3 แฮริสันพบว่าแกนลูกตุ้มติดสปริงแบบเดิมไม่สามารถแก้ไขปัญหาเนื่องจากอาการโคลงของเรือได้ทั้งหมด จึงได้เปลี่ยนแกนลูกตุ้มเป็นแบบวงแหวน และได้เพิ่มแหวนแบริ่งเพื่อลดความเสียดทาน แต่ H3 ก็ยังไม่ประสบความสำเร็จ
ในปี ค.ศ.๑๗๕๕ แฮริสันขอรับเงินสนับสนุนจากคณะกรรมการ BOARD OF LONGITUDE อีกครั้ง เพื่อสร้างนาฬิกาเรือนใหม่อีกหนึ่งเรือน ในครั้งนี้แฮริสันเริ่มออกแบบ H4 ใหม่ทั้งหมด เนื่องจากเขาเชื่อว่าหลักการใช้สปริงเพื่อ ควบคุมการแกว่งของลูกตุ้มใน H1 ถึง H3 ไม่สามารถแก้ปัญหาเนื่องจากอาการโคลงของเรือได้อย่างสมบูรณ์ โดยแฮริสันได้ความคิดในการออกแบบ H4 จากนาฬิกาพกขนาดเล็กที่เขาใช้ในการตรวจสอบความเที่ยงตรงของ H3 โดยเพิ่มการปรับปรุงอีกเล็กน้อย ทำให้ H4 มีขนาดเพียง ๑๓ เซนติเมตร และมีน้ำหนักประมาณ ๑.๔๕ กิโลกรัม (H1 มีน้ำหนักกว่า ๓๐ กิโลกรัม) แฮริสันใช้เวลาสร้าง H4 นาน ๔ ปี และในปี ค.ศ.๑๗๖๑ วิลเลี่ยม แฮริสัน ซึ่งเป็นลูกชายของแฮริสัน ได้นำ H4 ไปทดลองบนเรือ DEPTFORD โดยเดินทางจากอังกฤษไปยังจาไมกา ผลการทดลองออกมาเป็นที่น่าพอใจ โดยนาฬิกา H4 เดินช้าไปเพียง ๕ วินาที ตลอดระยะเวลา ๒ เดือนในทะเล และต่อมาวิลเลี่ยมได้นำ H4 ไปทดลองในทะเลอีกครั้งในปี ค.ศ.๑๗๖๔ ในครั้งนี้นาฬิกา H4 เดินช้าไป ๓๙ วินาที ซึ่งผ่านเกณฑ์ ๒ นาที ที่คณะกรรมการ BOARD OF LONGITUDE กำหนดไว้ในเงื่อนไขสำหรับเงินรางวัล ๒๐,๐๐๐ ปอนด์ แต่คณะกรรมการ BOARD OF LONGITUDE ยังไม่ยอมจ่ายเงินรางวัลให้กับแฮริสัน โดยตั้งเงื่อนไขเพิ่มเติมว่าแฮริสันจะต้องมอบนาฬิกา H4 ให้กับคณะกรรมการฯ พร้อมทั้งเปิดเผยหลักการทำงาน ภายในทั้งหมด และแฮริสันจะต้องสร้างนาฬิกาแบบเดียวกับ H4 อีก ๒ เรือน

ในปี ค.ศ.๑๗๖๕ แฮริสันได้รับเงินรางวัลครึ่งแรกจำนวน ๑๐,๐๐๐ ปอนด์ หลังจากเปิดเผยการทำงานภายในของ H4 และมอบนาฬิกาให้กับคณะกรรมการ BOARD OF LONGITUDE ซึ่งคณะกรรมการฯ ได้มอบหมายให้ ลาร์คัม เคนดัล (LARCUM KENDALL) สร้างนาฬิกาเลียนแบบ H4 ขึ้น เคนดัลสร้างนาฬิกาเลียนแบบ H4 (เรียกว่า K1) เสร็จในปี ค.ศ.๑๗๖๙ พร้อมกับนาฬิกา H5 ของ แฮริสัน และในปี ค.ศ.๑๗๗๐ คณะกรรมการฯ ได้ทดสอบนาฬิกาทั้งสองเรือนจนเป็นที่พอใจ แฮริสันได้ขอให้คณะกรรมการฯ นับ K1 และ H5 เป็นนาฬิกา ๒ เรือน ตามเงื่อนไขใหม่ แต่คณะกรรมการฯ ยังยืนยันให้แฮริสัน (ซึ่งในขณะนั้นมีอายุ ๗๗ ปี) สร้าง H6 ก่อนจะได้รับเงินรางวัลที่เหลือ ในปี ค.ศ.๑๗๗๒ แฮริสันจึงเขียนจดหมายร้องเรียนถึงกษัตริย์จอร์จที่สาม แห่งอังกฤษ และได้รับเงินรางวัลที่เหลือในที่สุดในปี ค.ศ.๑๗๗๓ สรุปว่าแฮริสันต้องพยายามอยู่ถึง ๑๒ ปี หลังจากที่เขาสร้าง H4 จึงได้รับการยอมรับจากคณะกรรมการฯ ว่าเป็นผู้ที่แก้ปัญหาลองจิจูดได้สำเร็จ
ในขณะที่แฮริสันกำลังร้องเรียนต่อคณะกรรมการ BOARD OF LONGITUDE ในปี ค.ศ.๑๗๗๒ เจมส์ คุก (JAMES COOK) ชาวอังกฤษ ได้ออกเดินทางสำรวจมหาสมุทรแปซิฟิกตอนใต้ พร้อมกับนำนาฬิกา K1 ของเคนดัลไปด้วย คุกมีชื่อเสียงในฐานะนักเดินเรือที่มีความเป็นชาวเรือสูง และเป็นที่ไว้วางใจของกษัตริย์ให้ทำการสำรวจมหาสมุทรแปซิฟิกถึงสามครั้ง โดยการสำรวจในปี ค.ศ.๑๗๗๒ เป็นการสำรวจมหาสมุทรแปซิฟิกและการเดินเรือรอบโลกครั้งที่สองของคุก นอกจากนี้คุกยังเป็นกัปตันคนแรกที่เห็นความสำคัญของสุขอนามัยของลูกเรือ โดยเขาบังคับให้ลูกเรืออาบน้ำ และรับประทานผักและผลไม้เพื่อป้องกันโรคขาดสารอาหาร ซึ่งเป็นสาเหตุการตายอันดับต้นๆ ของลูกเรือเดินสมุทรในสมัยนั้น คุกเดินทางกลับมาถึงอังกฤษในปี ค.ศ.๑๗๗๕ ตลอดการเดินทางสำรวจมหาสมุทรแปซิฟิกเป็นเวลากว่าสามปี คุกได้ใช้นาฬิกา K1 ในการหาลองจิจูดด้วยอัตราความ เที่ยงตรงเฉลี่ยไม่เกิน ๘ วินาที (เทียบเท่ากับระยะทางไม่เกิน ๒ ไมล์) การเดินทางสำรวจของคุกถือเป็นการใช้งานจริงของนาฬิกาเพื่อหาที่เรือในทะเลเป็นครั้งแรก และหลังจากที่คุกเดินทางกลับมาได้หนึ่งปี แฮริสันก็เสียชีวิตลงด้วยอายุ ๘๓ ปี
การเดินเรือดาราศาสตร์สมัยใหม่
ในช่วงศตวรรษที่ ๑๗ – ๑๘ การเดินเรือดาราศาสตร์ได้พัฒนาทั้งด้านเครื่องมือวัดและด้านวิธีการคำนวณจนนักเดินเรือสามารถหาที่เรือได้แม่นยำภายในระยะไม่กี่ไมล์ และได้กลายเป็นวิธีหลักสำหรับการเดินเรือในมหาสมุทรหรือทะเลเปิดไกลฝั่งในยุคนั้น แต่หลักการของการเดินเรือ ดาราศาสตร์ในศตวรรษที่ ๑๘ นั้น ไม่เหมือนกับการเดินเรือดาราศาสตร์ในปัจจุบันเสียทีเดียว กล่าวคือที่เรือในสมัยนั้นได้มาจากการหาละติจูดและลองจิจูดจากการวัดวัตถุท้องฟ้าโดยตรง โดยค่าละติจูดหาได้จากการวัดดาวเหนือ (ในซีกโลกเหนือ) หรือการวัดดวงอาทิตย์ขณะผ่านเมอริเดียน ส่วนค่าลองจิจูดหาได้จากวิธี LUNAR DISTANCE หรือการวัดดวงอาทิตย์เพื่อหาเวลาท้องถิ่น (LOCAL APPARENT TIME) แล้วคำนวณหาค่าลองจิจูดโดยใช้เวลามาตรฐานประกอบกับค่าละติจูดที่หาได้ก่อนหน้า
หลักการของเส้นตำบลที่ท้องฟ้า (CELESTIAL LINE OF POSITION) และวิธี ALTITUDE INTERCEPT ที่นักเดินเรือในปัจจุบันคุ้นเคย ยังไม่ได้ถูกคิดค้นในศตวรรษที่ ๑๘ ทั้งที่นักเดินเรือในสมัยนั้นใช้วิธีเดินเรือดาราศาสตร์เป็นวิธีหลักในการเดินเรือในทะเลห่างฝั่งมานับร้อยปี จนกระทั่งในปี ค.ศ.๑๘๓๗ (พ.ศ.๒๓๘๐ – ตรงกับสมัยพระบาทสมเด็จพระนั่งเกล้าเจ้าอยู่หัว ในช่วง รัตนโกสินทร์ตอนต้น) ธอมัส ซัมเนอร์ (THOMAS SUMNER) ชาวอังกฤษ ได้ค้นพบหลักการ เส้นตำบลที่ท้องฟ้าโดยบังเอิญขณะนำเรือเข้าช่องแคบ ST. GEORGE ระหว่างไอร์แลนด์กับเวลส์ อย่างไรก็ดี การค้นพบของซัมเนอร์ไม่ได้อาศัยเพียงโชคและจังหวะความบังเอิญเพียงอย่างเดียว แต่ต้องอาศัยความช่างสังเกตและความเป็นชาวเรือของซัมเนอร์เองด้วย ซึ่งการค้นพบของซัมเนอร์จัดได้ว่าเป็นพื้นฐานสำคัญของการเดินเรือดาราศาสตร์สมัยใหม่ในปัจจุบัน

ซัมเนอร์ออกเดินทางจากชาร์ลสตัน (CHARLSTON, SOUTH CAROLINA) ในปลายเดือนพฤศจิกายน ค.ศ.๑๘๓๗ เพื่อเดินทางไปยังกรีนอค (GREENOCK, SCOTLAND) บนฝั่งตะวันตกของเกาะอังกฤษ เรือของซัมเนอร์ใช้เวลา ๒๒ วัน เดินทางมาถึงหน้าช่องแคบ ST. GEORGE ในกลางเดือนธันวาคม แต่สภาพอากาศปิดทำให้ซัมเนอร์ไม่สามารถหาที่เรือดาราศาสตร์ได้ ต้องอาศัยเพียงที่เรือรายงานมาหลายวัน ซัมเนอร์จึงรอให้สว่างก่อนจึงเริ่มเปลี่ยนเข็มไปทางตะวันออก เฉียงเหนือเพื่อเข้าช่องแคบ ซึ่งมีความกว้างประมาณ ๔๐ ไมล์ ในตอนเช้าของวันรุ่งขึ้นท้องฟ้าเริ่มเปิดพอให้ซัมเนอร์วัดดวงอาทิตย์เพื่อหาค่าลองจิจูดได้ แต่เขายังไม่มีค่าละติจูดสำหรับใช้ในการคำนวณหาเวลาท้องถิ่น ซัมเนอร์จึงประมาณค่าละติจูดจากที่เรือรายงาน โดยเขาทำการคำนวณ ๓ – ๔ ครั้งด้วยค่าละติจูดที่ต่างกันเพื่อหาค่าเฉลี่ย แต่ผลที่ได้ทำให้ซัมเนอร์ประหลาดใจเมื่อตำบลที่ที่ได้จากการคำนวณทั้งหมดเรียงกันเป็นเส้นตรงพอดี นอกจากนี้ซัมเนอร์ยังโชคดีที่เส้นตรงดังกล่าวลากเกือบผ่านกระโจมไฟ SMALL’S LIGHT ซึ่งอยู่ห่างออกไปทางตะวันออกเฉียงเหนือประมาณ ๒๐ – ๓๐ ไมล์ ซึ่ง ณ เวลานั้นซัมเนอร์เข้าใจสิ่งที่เขาได้ค้นพบนั้นเป็นเพียงความบังเอิญ แต่ด้วยความช่างสังเกตและไหวพริบทำให้ซัมเนอร์พบว่าเขาสามารถใช้เส้นนี้แทนเส้นตำบลที่ได้ ซึ่งที่เรือจะต้องอยู่ที่ใดที่หนึ่งบนเส้นนี้ และหากเขานำเรือไปทางตะวันออกเฉียงเหนือตามเส้นนี้ไปเรื่อยๆ ก็จะเห็นกระโจมไฟ SMALL’S LIGHT ในที่สุด และสมมุติฐานของซัมเนอร์ก็ได้รับการยืนยันเมื่อเรือของเขาผ่านกระโจมไฟ SMALL’S LIGHT จริง ซึ่งหากซัมเนอร์ไม่ทันฉุกคิดเรื่องเส้นตำบลที่ หรือเกิดซุ่มซ่ามนำเรือไปเกยหินเสียก่อน การพัฒนาการเดินเรือดาราศาสตร์ก็อาจต้องใช้เวลานานกว่านี้
ต่อมาซัมเนอร์ได้ศึกษาเหตุการณ์ที่ช่องแคบ ST.GEORGE เพิ่มเติม และพบว่าเส้นตำบลที่ ที่ได้นั้นไม่ใช่ความบังเอิญ นอกจากนั้นเส้นตำบลที่ดังกล่าวยังทำมุมตั้งฉากกับมุม AZIMUTH ของดวงอาทิตย์ และในปี ค.ศ.๑๘๔๓ ซัมเนอร์ได้ตีพิมพ์หนังสืออธิบายวิธีหาที่เรือด้วยการตัดกันของเส้นตำบลที่ดาราศาสตร์สองเส้นโดยเส้นตำบลที่เส้นแรกได้มาจากการวัดดาว ๑ ดวง แล้วคำนวณหาลองจิจูดจากค่าละติจูดที่ได้จากที่เรือรายงาน ๒ ครั้ง (เช่นเดียวกับที่ซัมเนอร์ทำที่ช่องแคบ ST.GEORGE) ส่วนเส้นตำบลที่ดาราศาสตร์อีกเส้นอาจได้มาจากการวัดดาวอีก ๑ ดวง หรือการวัดดาวดวงเดิมในเวลาต่อมา
อันที่จริงแล้ว เส้นตำบลที่ที่ซัมเนอร์ค้นพบไม่ได้เป็นเส้นตรง แต่เป็นส่วนโค้งของวงกลมที่มีรัศมีกว้างมาก เมื่อนำแค่ส่วนเล็กของส่วนโค้งดังกล่าวมาพล๊อตบนแผนที่จึงออกมาเกือบเป็นเส้นตรง ซึ่งไม่ว่าตำบลที่ใดบนเส้นนี้จะวัดมุมสูงของวัตถุท้องฟ้าได้เท่ากัน จึงเรียกวงกลมนี้ว่าวงสูงเท่า
การค้นพบของซัมเนอร์ถือได้ว่าเป็นพื้นฐานสำคัญของการเดินเรือดาราศาสตร์สมัยใหม่ และต่อมาชาวฝรั่งเศสชื่อ ADOLPHE-LAURENT-ANATOLE MARCQ DE BLONDE DE SAINT-HILAIRE ได้ศึกษาการค้นพบของซัมเนอร์และหลักการวงสูงเท่าเพิ่มเติม และพบว่ามุมสูงของวัตถุท้องฟ้าที่วัดได้สามารถใช้บอกรัศมีของวงสูงเท่าได้ กล่าวคือที่มุม ๙๐ องศา วงสูงเท่าจะมีรัศมีเป็นศูนย์ (ผู้ตรวจอยู่ใต้ดาวพอดี) และมุมที่ลดลงทุก ๑ ลิปดา จะเท่ากับรัศมีที่เพิ่มขึ้น ๑ ไมล์ และ SAINT-HILAIRE ได้อาศัยหลักการดังกล่าวในการคิดค้นวิธีการหาที่เรือดาราศาสตร์แบบ ALTITUDE INTERCEPT และได้ตีพิมพ์เป็นหนังสือในปี ค.ศ.๑๘๗๕ (พ.ศ.๒๔๑๘) หรือ ๓๘ ปี หลังจากการค้นพบของซัมเนอร์ วิธีการหาที่เรือดาราศาสตร์แบบ ALTITUDE INTERCEPT ของ SAINT-HILAIRE นับเป็นต้นแบบของวิธีที่ใช้ในปัจจุบัน และถือได้ว่าเป็นขั้นสูงสุดของการพัฒนาทฤษฎีการเดินเรือดาราศาสตร์ แต่สูตรการคำนวณที่ใช้ค่อนข้างยุ่งยากและซับซ้อน ต่อมาในช่วงต้นศตวรรษที่ ๒๐ OGURA ชาวญี่ปุ่น จึงได้ริเริ่มการใช้ตาราง SIGHT REDUCTION ซึ่งเป็นวิธีที่ใช้มาจนถึงปัจจุบัน
เข้าสู่ยุคแห่งการเดินเรืออิเล็กทรอนิกส์
วิธี ALTITUDE INTERCEPT ของ SAINT-HILAIRE ทำให้การเดินเรือดาราศาสตร์ได้พัฒนามาจนถึงขั้นสูงสุด และนักเดินเรือได้ใช้วิธีนี้เป็นหลักในการเดินเรือมานับร้อยปี ในยุคนี้การเดินเรือเริ่มเข้าสู่ยุคแห่งความเป็นศาสตร์มากขึ้น ทั้งในด้านของเครื่องมือและอุปกรณ์ เช่น เครื่องวัดดาว และนาฬิกาโครโนเมตร และในด้านความรู้ทางดาราศาสตร์ คณิตศาสตร์ และเทคนิคการคำนวณหาที่เรือ

ในช่วงปลายศตวรรษที่ ๑๙ ถึงต้นศตวรรษที่ ๒๐ การพัฒนาวิทยาศาสตร์และเทคโนโลยีเน้นหนักไปทางการพัฒนาระบบขับเคลื่อนเรือมากกว่าการเดินเรือและการหาที่เรือ โดยการพัฒนาระบบขับเคลื่อนเรือเริ่มมาจากการนำเครื่องจักรไอน้ำที่ใช้เชื้อเพลิงถ่านหินมาใช้แทนใบเรือในช่วงกลางศตวรรษที่ ๑๙ ทำให้นักเดินเรือไม่ต้องพึ่งพากระแสลมและกระแสน้ำตามธรรมชาติอีกต่อไป (THOMAS NEWCOMEN และ JAMES WATT ได้ประดิษฐ์และพัฒนาเครื่องจักรไอน้ำในศตวรรษที่ ๑๘) จากนั้นระบบขับเคลื่อนเรือก็ได้ถูกพัฒนาเรื่อยมาจากเครื่องจักรไอน้ำ มาจนถึงเครื่องยนต์ดีเซลและเครื่องยนต์กังหันไอน้ำ
การเดินเรือดาราศาสตร์ได้พัฒนามาจนสามารถหาที่เรือได้ความแม่นยำภายในระยะไม่กี่ไมล์ แต่เมฆและสภาพอากาศปิดอาจทำให้นักเดินเรือไม่สามารถหาที่เรือในทะเลได้เป็นเวลานานหลายวัน อย่างไรก็ดีการใช้ที่เรือรายงานประกอบกับที่เรือดาราศาสตร์ยังคงเพียงพอในยุคของเรือใบซึ่งเรือมีความเร็วต่ำ ต่อมาการพัฒนาระบบขับเคลื่อนเรือส่งผลให้เรือมีความเร็วสูงขึ้นมาก และเรือเดินสมุทรได้กลายเป็นอุตสาหกรรมขนาดใหญ่ที่ต้องการความแม่นยำและความปลอดภัยสูง ประกอบกับการพัฒนาระบบอิเล็กทรอนิกส์ในช่วงต้นศตวรรษที่ ๒๐ ทำให้การเดินเรือและระบบหาตำบลเรือที่ได้ผ่านวิวัฒนาการอีกขั้นหนึ่งเข้าสู่ยุคแห่งการเดินเรืออิเล็กทรอนิกส์ที่สามารถหาที่เรือได้อย่างแม่นยำในทุกสภาพอากาศ
ระบบวิทยุหาที่เรือ (RADIO NAVIGATION SYSTEM)
ระบบวิทยุหาที่เรือใช้การแพร่คลื่นวิทยุในการหาตำบลที่เรือ โดยแบ่งออกได้เป็นสองประเภทใหญ่ๆ คือระบบวิทยุหาทิศซึ่งให้ค่าแบริ่งจากการส่งคลื่นวิทยุเป็นบีมเส้นตรง (ระบบ A-N) หรือการใช้เสาอากาศแบบหาทิศ (RADIO DIRECTION FINDER) และระบบไฮเปอร์บอลิค (HYPERBOLIC RADIO NAVIGATION) ซึ่งให้เส้นตำบลที่จากการเปรียบเทียบเวลาหรือเฟสจากสถานีส่งสามแห่งขึ้นไป
ความเป็นมาของการค้นพบคลื่นวิทยุ เริ่มขึ้นเมื่อปี ค.ศ.๑๘๓๒ (พ.ศ.๒๓๘๕ – ตรงกับสมัยรัชกาลที่ ๓) ไมเคิล ฟาราเดย์ (MICHAEL FARADAY) ชาวอังกฤษได้เสนอทฤษฎีว่าด้วยคลื่น พลังงานที่เกิดจากความสัมพันธ์ระหว่างกระแสไฟฟ้าและสนามแม่เหล็ก แต่ความรู้ทางคณิตศาสตร์และฟิสิกส์ในสมัยนั้นยังไม่สามารถพิสูจน์ทฤษฎีของฟาราเดย์ได้ ต่อมาในปี ค.ศ.๑๘๕๕ (พ.ศ.๒๓๙๘ – ตรงกับสมัยรัชกาลที่ ๔) เจมส์ แมกซ์เวลล์ (JAMES MAXWELL) ชาวอังกฤษได้พิสูจน์ทฤษฎี ความสัมพันธ์ระหว่างไฟฟ้าและสนามแม่เหล็กของฟาราเดย์ได้ด้วยสมการทางคณิตศาสตร์ แต่ก็ยังไม่มาใครสามารถพิสูจน์ทฤษฎีและสมการ ดังกล่าวได้ด้วยการทดลอง จนกระทั่งในปี ค.ศ.๑๘๘๗ (พ.ศ.๒๔๓๐ – ตรงกับสมัยรัชกาลที่ ๕) ไฮน์ริค เฮิรตซ์ (HEINRICH HERTZ) ชาวเยอรมัน ได้ออกแบบการทดลองแพร่คลื่นแม่เหล็กไฟฟ้า หรือคลื่นวิทยุ โดยใช้ไฟฟ้ากระแสสลับ ความถี่สูง และสามารถวัดความยาวคลื่นและความถี่ได้ตรงตาม การคำนวณด้วยสมการของแมกซ์เวลล์

สงครามโลกทั้งสองครั้งในช่วงต้นศตวรรษที่ ๒๐ มีส่วนสำคัญในการเร่งการพัฒนาเทคโนโลยีในหลายๆ ด้าน และคลื่นวิทยุได้ถูกนำมาใช้ในการนำทางเครื่องบินทิ้งระเบิดระยะไกลอย่างได้ผล โดยรูปแบบแรกของระบบนำทางด้วยคลื่นวิทยุเรียกว่าระบบ A-N ซึ่งใช้การส่งสัญญาณมอร์ส A (• –) และ N (– •) จากเสาอากาศสองแห่งพร้อมกัน หากนักบินรักษาระยะระหว่างเสาอากาศทั้งสองแห่งเท่ากันก็จะได้ยินเสียงสัญญาณมอร์ส A และ N ซ้อนกันเป็นโทนสัญญาณคงที่ แต่ถ้านักบินอยู่ใกล้เสาอากาศเสาใดเสาหนึ่งมากกว่าก็จะได้ยินสัญญาณมอร์สจากเสานั้นดังกว่า โดยฝ่ายเยอรมันได้ใช้ระบบนำทางด้วยคลื่นวิทยุนี้ในการนำเครื่องบินไป ทิ้งระเบิดบนเกาะอังกฤษ ทำให้สามารถทิ้งระเบิดโจมตีอังกฤษได้แม้ในเวลากลางคืน
ระบบ A-N สามารถให้แบริ่งคงที่ได้เพียงแบริ่งเดียวจากเสาอากาศหนึ่งคู่ ซึ่งเหมาะกับการนำเครื่องบินเข้าหาที่หมาย แต่ไม่เหมาะกับการเดินเรือในทะเล จึงได้มีการพัฒนาเครื่องวิทยุหาทิศ (RADIO DIRECTION FINDER – RDF) ขึ้น ซึ่งสามารถใช้บอกแบริ่งจากสถานีส่งได้ทุกทิศทาง และนักเดินเรือสามารถหาที่เรือได้จากจุดตัดระหว่างเส้นแบริ่งสองเส้นจากสถานีส่งสองแห่ง
ระบบวิทยุหาที่เรืออีกประเภทหนึ่งเรียกว่าระบบวิทยุหาที่เรือแบบไฮเปอร์บอลิค (HYPERBOLIC RADIONAVIGATION) ได้ถูกพัฒนาขึ้นในช่วงปลายสงครามโลกครั้งที่สอง ระบบวิทยุหาที่เรือประเภทนี้อาศัยความต่างของเวลาที่สัญญาณวิทยุจากสถานีส่งสองแห่งเดินทางมาถึงเครื่องรับ โดยค่าความต่างของเวลาจากสถานีส่งหนึ่งคู่จะให้เส้นตำบลที่แบบไฮเปอร์บอลิค (HYPERBOLIC LINE OF POSITION) หนึ่งเส้น และตำบลที่เรือแน่นอน (ELECTRONIC FIX) สามารถหาได้จากจุดตัดของเส้นตำบลที่ไฮเปอร์บอลิคสองเส้น โดยอาศัยสถานีส่งสองคู่ (จากสถานีส่งอย่างน้อยสามแห่ง) ระบบวิทยุหาที่เรือแบบไฮเปอร์บอลิคแบบแรกที่ถูกพัฒนาขึ้นคือระบบ GEE ของอังกฤษในปี ค.ศ.๑๙๔๒ (พ.ศ.๒๔๘๕) ซึ่งใช้ย่านความถี่ ๓๐ – ๘๐ เมกะเฮิรตซ์ และต่อมาในปี ค.ศ.๑๙๔๓ (พ.ศ.๒๔๘๖) สหรัฐอเมริกาก็ได้พัฒนาระบบ LORAN (ย่อมาจาก LONG RANGE NAVIGATION) ซึ่งประกอบด้วยสถานีส่งกว่า ๗๐ แห่ง ส่งสัญญาณในย่านความถี่ ๑๘๕๐ – ๑๙๕๐ กิโลเฮิรตซ์ มีระยะทำการกว่า ๖๐๐ ไมล์ ครอบคลุมพื้นที่เกือบ หนึ่งในสามของโลก


การพัฒนาเทคโนโลยีวิทยุความถี่ต่ำหลังจากสงครามโลกครั้งที่ ๒ ทำให้ระบบ LORAN ได้ถูกพัฒนาต่อมาเป็น LORAN-C ในช่วงต้นทศวรรษที่ ๑๙๕๐ ระบบ LORAN-C ประกอบด้วยกลุ่มสถานีส่งหลายแห่งห่างกันหลายร้อยไมล์ในหลายประเทศ โดยแต่ละกลุ่มประกอบด้วยสถานีแม่ ๑ สถานีและสถานีย่อย ๒ – ๔ สถานี ซึ่งสถานีแม่และสถานีย่อยนี้จะส่งสัญญาณวิทยุแบบ PULSE ด้วยความถี่ ๑๐๐ กิโลเฮิรตซ์ ออกมาตามลำดับ จากนั้นเครื่องรับบนเรือจะคำนวณค่าความต่างระหว่างระยะทางถึงสถานีแม่กับสถานีย่อยจากเวลาต่างของคลื่นวิทยุที่ได้รับ และแสดงค่าระยะต่างนั้นสำหรับพล๊อตบนแผนที่พิเศษที่มีเส้นไฮเปอร์บอลิค หรือแสดงค่าละติจูดและลองจิจูดโดยตรง ระบบ LORAN-C ให้ตำบลที่ที่มีความถูกต้อง (ACCURACY) และความแม่นยำ (PRECISION) สูง โดยมีค่าความถูกต้อง ๐.๑ – ๐.๒ ไมล์ และความแม่นยำ ๕๐ เมตร
ระบบวิทยุหาที่เรือที่สำคัญอีกระบบคือระบบ OMEGA ซึ่งถูกริเริ่มพัฒนาขึ้นโดย ทร.สหรัฐฯ ในปี ค.ศ.๑๙๔๗ (ก่อนหน้าระบบ LORAN-C เล็กน้อย) แต่เนื่องจากปัญหาความยุ่งยากทางเทคนิค ทำให้ต้องใช้เวลากว่า ๒๐ ปี กว่าจะเริ่มใช้งานได้ และสามารถใช้งานได้โดยสมบูรณ์ใน ปี ค.ศ.๑๙๘๒ (พ.ศ.๒๕๒๕) ระบบ OMEGA ประกอบด้วยสถานีส่ง ๘ สถานีทั่วโลก แต่ละสถานีตั้งอยู่ห่างกัน ๕,๐๐๐ – ๖,๐๐๐ ไมล์ ส่งสัญญาณวิทยุในย่านความถี่ต่ำมาก (๑๐ – ๑๔ กิโลเฮิรตซ์) ให้ระยะครอบคลุมทั่วโลก ระบบ OMEGA เป็นระบบวิทยุหาที่เรือแบบไฮเปอร์บอลิคเช่นเดียวกับระบบ LORAN-C แต่ต่างกันตรงที่ระบบ OMEGA ส่งสัญญาณแบบ CW ความถี่ต่ำมาก ๔ ความถี่ และใช้การเปรียบเทียบเฟสของคลื่น CW ในการคำนวณหาตำบลที่ ระบบ OMEGA ให้ที่เรือที่มีความถูกต้องแม่นยำ ๑ – ๒ ไมล์ ตลอด ๒๔ ชั่วโมง ทั่วโลก
การค้นพบคลื่นวิทยุของเฮิรตซ์นอกจากจะทำให้เกิดการพัฒนาระบบหาที่เรือด้วยวิทยุแล้ว คลื่นวิทยุยังได้ถูกนำมาใช้ในการตรวจจับวัตถุในระยะไกล ในปี ค.ศ.๑๙๓๕ (พ.ศ.๒๔๗๘) ROBERT WATSON-WATT ชาวอังกฤษได้คิดค้นระบบตรวจจับเครื่องบินด้วยการแพร่คลื่นวิทยุออกไปแล้วตรวจจับคลื่นที่สะท้อนกลับมา และในปี ค.ศ.๑๙๓๙ อังกฤษได้สร้างสถานีเรดาร์ขึ้นหลายแห่งตามแนวฝั่งตะวันออกเพื่อตรวจจับเครื่องบินทิ้งระเบิดที่จะมาโจมตีเกาะอังกฤษ โดยแต่ละสถานีจะโทรศัพท์แจ้งข้อมูลเป้าไปยังศูนย์รวบรวมข้อมูลกลางซึ่งทำหน้าที่พล๊อตติดตามสถานการณ์รวม และอีกไม่กี่ปีต่อมาได้มีการพัฒนาหลอด MAGNETRON ทำให้เรดาร์มีความยาวคลื่นสั้นลงและมีกำลังส่งสูงขึ้น ส่งผลให้เสาอากาศมีขนาดเล็กลงจนกระทั่งสามารถนำมาติดตั้งบนเรือได้ จึงได้เกิดการพัฒนาเรดาร์เดินเรือขึ้น
ระบบเดินเรือด้วยแรงเฉื่อย (INERTIAL NAVIGATION SYSTEM)
ระบบเดินเรือด้วยแรงเฉื่อยถูกพัฒนาขึ้นในปลายทศวรรษที่ ๑๙๕๐ เพื่อใช้กับเรือดำน้ำ ทำให้เรือดำน้ำสามารถทราบตำบลที่ได้โดยไม่ต้องโผล่ขึ้นมาเหนือน้ำ และต่อมาระบบเดินเรือด้วยแรงเฉื่อยได้ถูกนำมาใช้กับเรือ และอากาศยาน โดยระบบเดินเรือด้วยแรงเฉื่อยติดตามการเคลื่อนที่ของเรือโดยไม่ต้องอาศัยแหล่งอ้างอิงจากภายนอก (เช่นสัญญาณวิทยุหรือดาวต่างๆ) ด้วยการวัดอัตราเร่งของเรือและนำมาคำนวณเป็นการเคลื่อนที่ของเรือ ดังนั้นระบบเดินเรือด้วยแรงเฉื่อยจึงอาจเรียกได้ว่าเป็นระบบเดินเรือรายงานที่สามารถตรวจจับการเคลื่อนที่ของเรือได้อย่างแม่นยำด้วยอุปกรณ์อิเล็กทรอนิกส์ที่ซับซ้อนนั่นเอง
ที่มาของระบบเดินเรือด้วยแรงเฉื่อยเริ่มต้นมาจากการประดิษฐ์ไยโร (GYROSCOPE) โดย ผู้ที่คิดประดิษฐ์ไยโรเป็นคนแรกคือนักฟิสิกส์ชาวฝรั่งเศสชื่อ JEAN BERNARD LEON FOUCAULT เมื่อปี ค.ศ.๑๘๕๒ (พ.ศ.๒๓๙๕ – ตรงกับสมัยรัชกาลที่ ๔) โดยสร้างเป็นลูกข่างที่มีแกนหมุนอยู่ในวงแหวนที่หมุนได้โดยอิสระ เพื่อใช้เป็นแกนอ้างอิงในการศึกษาการหมุนของโลก เนื่องจากลูกข่างไยโร (หรือมวลที่หมุนรอบแกนด้วยความเร็วสูง) มีคุณสมบัติในการรักษาแนวแกนหมุนให้คงที่เมื่อไม่มีแรงกระทำจาก ภายนอก อย่างไรก็ดี FOUCAULT ไม่ประสบความสำเร็จนักในการใช้ไยโรเพื่อวัดการหมุนของโลกเนื่องจากปัญหาแรงเสียดทานในแกนหมุนและวงแหวน เขาจึงได้หันไปใช้การแกว่งของลูกตุ้มยาวเพื่อวัดการหมุนของโลกแทน

ในปี ค.ศ.๑๘๙๐ (พ.ศ.๒๔๓๓ – ตรงกับสมัยรัชกาลที่ ๕) G.M. HOPKINS ได้คิดประดิษฐ์ไยโรที่หมุนด้วยมอเตอร์ไฟฟ้า และอีกเพียงสิบกว่าปีต่อมา นักประดิษฐ์ชาวเยอรมันและอเมริกันก็ได้ประดิษฐ์เข็มทิศไยโรขึ้นในเวลาไล่เลี่ยกัน ในปี ค.ศ.๑๙๐๓ (พ.ศ.๒๔๔๖) HERMAN ANSCHUTZ ชาวเยอรมันได้ประดิษฐ์เข็มทิศไยโร (หรือไยโรที่มีแกนหมุนชี้ไปยังทิศเหนือตลอดเวลา) ขึ้นเพื่อแก้ปัญหาผลกระทบจากอำนาจแม่เหล็กเรือต่อเข็มทิศแม่เหล็ก เข็มทิศไยโรมีความ ซับซ้อนมากกว่าไยโรธรรมดาเนื่องจากไยโรธรรมดาจะรักษาแกนหมุนให้คงที่โดยไม่ขึ้นกับการหมุนของโลก ทำให้แกนหมุนของไยโรชี้ผิดไปจากทิศเหนือจริงเมื่อโลกหมุน เข็มทิศไยโรอาศัยแรงปรากฏที่เกิดจากการหมุนรอบตัวเองของโลกในการรักษาแกนหมุนให้ตรงกับทิศเหนือจริงตลอดเวลา ขนาดของแรงปรากฏนี้จะลดลงเมื่อเข้าใกล้แกนหมุนของโลก ดังนั้นเข็มทิศไยโรจึงไม่สามารถใช้การได้ที่ละติจูดที่สูง (ใกล้ขั้วโลก) เนื่องจากขนาดของแรงปรากฏจากการหมุนของโลกไม่ เพียงพอ ในปี ค.ศ.๑๙๐๘ เอลเมอร์ เสปอร์รี่ (ELMER SPERRY) ชาวอเมริกันก็ได้ประดิษฐ์เข็มทิศไยโรขึ้นเช่นกันโดยใช้หลักการเดียวกัน และเสปอร์รี่ได้สร้างเครื่องถือท้ายเรืออัตโนมัติ (AUTOPILOT) ขึ้นในปี ค.ศ.๑๙๑๑ โดยอาศัยเข็มทิศไยโรในการควบคุมทิศทาง เรียกว่าเครื่อง METAL MIKE
ระบบเดินเรือด้วยแรงเฉื่อยอาศัยไยโรในการรักษาแกนอ้างอิงในการวัดอัตราเร่งให้คงที่ โดยระบบเดินเรือด้วยแรงเฉื่อยประกอบด้วยเครื่องวัดอัตราเร่ง (ACCELEROMETER) สองตัวสำหรับวัดอัตราเร่งของเรือตามแนวเหนือ – ใต้ และตะวันออก – ตะวันตก และไยโรสำหรับรักษาแนวของเครื่องวัดอัตราเร่งให้คงที่และขนานกับพื้นโลกตลอดเวลาโดยใช้มอเตอร์ไฟฟ้าหมุนฐานของเครื่องวัดอัตราเร่งให้ตรงกับแกนหมุนของไยโรสามแกน โดยเครื่องวัดอัตราเร่งสามารถวัดค่าอัตราเร่งได้จากแรงที่กระทำต่อมวลตามกฎ F = MA ของนิวตัน จากนั้นระบบจะคำนวณการ เคลื่อนที่ของเรือจากผลรวมของอัตราเร่งจากทั้งสองแกน อย่างไรก็ดีแรงเสียดทานและความไม่สมบูรณ์เล็กน้อยอื่นๆ ของระบบไยโรทำให้ระบบเดินเรือด้วยแรงเฉื่อยค่อยๆ สะสมค่าความ คลาดเคลื่อนทีละน้อย ตำบลที่ที่ได้จึงจำเป็นต้องถูกตรวจสอบกับระบบหาที่เรือด้วยวิทยุหรือ ดาวเทียมเป็นระยะๆ

เนื่องจากแรงเสียดทานของไยโรเป็นสาเหตุสำคัญของการสะสมค่าความคลาดเคลื่อนในระบบเดินเรือด้วยแรงเฉื่อย จึงได้มีความพยายามที่จะแก้ปัญหาแรงเสียดทางนี้ด้วยการพัฒนาไยโรแบบ ESG หรือ ELECTROSTATIC GYRO ขึ้น (บางตำราก็ว่า ESG ย่อมาจาก ELECTRICALLY STABILIZED GYRO) โดยไยโรแบบ ESG ลดแรงเสียดทางด้วยใช้แรงจากสนามไฟฟ้าในการ รองรับ “ลูกข่าง” หรือมวลที่หมุนด้วยความเร็วสูงภายในแท่นสุญญากาศ ไยโรแบบ ESG ช่วยลดค่าความคลาดเคลื่อนสะสมในระบบเดินเรือด้วยแรงเฉื่อยได้ในระดับหนึ่ง แต่ยังไม่สามารถกำจัด ค่าความคลาดเคลื่อนสะสมนี้ได้ทั้งหมด และตำบลที่ที่ได้จึงยังจำเป็นต้องถูกเปรียบเทียบตรวจสอบกับระบบหาที่เรืออื่นอยู่
ระบบเดินเรือด้วยแรงเฉื่อยแบบใหม่ใช้เลเซอร์ไยโร (LASER GYRO หรือ RING LASER GYRO) แทนไยโรที่ใช้มวลหมุนด้วยความเร็วสูงแบบเดิม เลเซอร์ไยโรใช้เส้นทางเดินของแสงเลเซอร์เป็น วงแหวนรอบแกนในการวัดการหมุนรอบแกนนั้น โดยเครื่องกำเนิดแสงเลเซอร์จะสร้างลำแสงเลเซอร์ที่มี เฟสตรงกันสองลำในทิศทางตรงกันข้ามกันตามเส้นทางเดินรอบแกน เมื่อมีการหมุนรอบแกน เส้นทางเดินของลำแสงที่เคลื่อนที่ไปตามการหมุนจะทำให้ลำแสงหนึ่งมีทิศทางเดียวกับการหมุน และลำแสงอีกลำมีทิศทางตรงกันข้ามกับการหมุน และเกิดความแตกต่างระหว่างเฟสของลำแสงสองลำขึ้น ซึ่งขนาดของความแตกต่างระหว่างเฟสนี้จะขึ้นอยู่กับความเร็วของการหมุน เนื่องจากเลเซอร์ไยโรไม่ได้อาศัยมวลที่หมุนด้วยความเร็วสูงในการรักษาแกนอ้างอิง จึงไม่มีปัญหาค่าความคลาดเคลื่อนสะสมเนื่องจากแรงเสียดทานแบบไยโรลูกข่าง
ระบบหาที่เรือด้วยดาวเทียม (SATELLITE NAVIGATION SYSTEM)
ระบบเดินเรือด้วยแรงเฉื่อยด้วยเลเซอร์ไยโรจะสามารถติดตามการเคลื่อนที่ของเรือได้ ถูกต้องแม่นยำกว่าการเดินเรือรายงานแบบดั้งเดิมมาก แต่วิธีเดียวในการยืนยันความถูกต้องของ ตำบลที่เรือยังคงต้องอาศัยจุดอ้างอิงจากภายนอกตัวเรือ และด้วยเหตุผลด้านความปลอดภัย ระบบ เดินเรือด้วยแรงเฉื่อยจึงมักถูกใช้ประกอบกับระบบหาที่เรือที่อาศัยแหล่งอ้างอิงจากภายนอก เช่นระบบหาที่เรือด้วยวิทยุ อย่างไรก็ดีระบบหาที่เรือด้วยวิทยุในช่วงกลางศตวรรษที่ ๒๐ ยังมีข้อจำกัดในด้านพื้นที่ครอบคลุมและความถูกต้องแม่นยำ โดยระบบ LORAN-C ให้ตำบลที่ที่มีความถูกต้อง แม่นยำสูง แต่มีพื้นที่ครอบคลุมจำกัด และความถูกต้องแม่นยำจะลดลงเมื่อระยะจากสถานีส่ง เพิ่มมากขึ้น ส่วนระบบ OMEGA ใช้คลื่นวิทยุย่านความถี่ต่ำมากซึ่งให้การครอบคลุมทั่วโลก แต่การใช้คลื่นวิทยุย่านความถี่ต่ำมากซึ่งมีขนาดความยาวคลื่นกว่าสิบไมล์ทำให้ให้ความถูกแม่นยำลดลง

การพัฒนาระบบหาที่เรือด้วยดาวเทียมเกิดมาจากความต้องการระบบที่สามารถให้ตำบลที่ ที่มีความถูกต้องแม่นยำสูงตลอด ๒๔ ชั่วโมง และมีพื้นที่ครอบคลุมทั่วโลก โดยแนวความคิดในการนำดาวเทียมมาใช้หาที่เรือได้ถือกำเนิดขึ้นมาพร้อมๆ กับความสำเร็จในการส่งดาวเทียมขึ้นสู่วงโคจรเป็นครั้งแรกในปี ค.ศ.๑๙๕๗ (พ.ศ.๒๕๐๐) โดยนักวิทยาศาสตร์ที่สถาบันวิจัย APPLIED PHYSICS LABORATORY ณ มหาวิทยาลัย JOHNS HOPKINS ได้สังเกตปรากฏการณ์ DOPPLER ของสัญญาณวิทยุจากดาวเทียม SPUTNIK ของสหภาพโซเวียตขณะที่ดาวเทียมเคลื่อนที่ผ่านฝั่งตะวันออกของสหรัฐอเมริกา และพบว่าลักษณะของปรากฏการณ์ DOPPLER ของสัญญาณที่ส่งออกมาจากดาวเทียมผ่านสถานีภาคพื้นที่ทราบตำบลที่แน่นอนนั้น สามารถนำมาใช้คำนวณหาวงโคจรของดาวเทียมได้ และในทางกลับกัน ปรากฏการณ์ DOPPER จากดาวเทียมที่ทราบวงโคจรแน่นอนสามารถนำมาใช้คำนวณหาตำบลที่บน พื้นโลกได้ ในปีต่อมาสถาบันวิจัย APPLIED PHYSICS LABORATORY ได้ร่วมมือกับกองทัพเรือสหรัฐฯ ในการสร้างระบบหาที่เรือด้วยดาวเทียมขึ้น โดยอาศัยหลักการของปรากฏการณ์ DOPPLER เรียกว่าระบบ NAVSAT (NAVY NAVIGATION SATELLITE SYSTEM) หรือที่เป็นที่รู้จักในชื่อพลเรือนว่าระบบ TRANSIT
ปรากฏการณ์ DOPPLER และระบบ NAVSAT
ปรากฏการณ์ DOPPLER คือการที่ความถี่คลื่นเกิดการเปลี่ยนแปลงสูงขึ้นเมื่อแหล่งกำเนิดคลื่นและผู้รับมีการเคลื่อนที่สัมพันธ์เข้าหากัน และความถี่คลื่นจะเกิดการเปลี่ยนแปลงลดลงเมื่อแหล่งกำเนิดคลื่นและผู้รับมีการเคลื่อนที่สัมพันธ์ออกจากกัน โดยขนาดของการเปลี่ยนแปลงขึ้นอยู่กับความเร็วสัมพันธ์

ระบบ NAVSAT ใช้ลักษณะการเปลี่ยนแปลงความถี่ (DOPPLER SHIFT) ของสัญญาณที่ส่งออกมาจากดาวเทียมในการคำนวณหาตำบลที่ โดยการเปลี่ยนแปลงความถี่ของสัญญาณขณะที่ดาวเทียมเคลื่อนที่ผ่านตำบลที่ของเครื่องรับบนพื้นโลกแบ่งออกได้เป็น ๓ ช่วง ช่วงแรกคือช่วงที่ดาวเทียมกำลังเคลื่อนที่เข้าหาเครื่องรับ ความถี่ของสัญญาณที่รับได้จะมีค่าสูงและค่อยๆ ลดลงเมื่อดาวเทียมเคลื่อนที่เข้าใกล้เครื่องรับเนื่องจากความเร็วสัมพันธ์ในการเคลื่อนที่เข้าหาลดลง ช่วงที่สองคือช่วงที่ดาวเทียมผ่านเหนือเครื่องรับ ความถี่ของสัญญาณที่รับได้จะมีค่าเท่ากับความถี่ที่ส่งออกมาจริง และช่วงที่สามคือช่วงที่ดาวเทียมเคลื่อนที่ออกจากเครื่องรับ ความถี่ของสัญญาณที่รับได้จะมีค่าลดลงไปตามระยะห่างจากเครื่องรับ
ระบบ NAVSAT เริ่มใช้ในปี ค.ศ.๑๙๖๔ (พ.ศ.๒๕๐๗) ส่วนประกอบหลักของระบบประกอบด้วยดาวเทียม ๑๓ ดวง (สำรอง ๓ ดวง) โคจรรอบโลกที่ความสูง ๖๐๐ ไมล์ ด้วยความเร็วประมาณ ๕ ไมล์ต่อวินาที (ดาวเทียมแต่ละดวงโคจรรอบโลกทุก ๑๐๗ นาที) สถานีภาคพื้นทำหน้าที่ติดตามดาวเทียมในวงโคจรและส่งค่าแก้ต่างๆ ให้กับดาวเทียม และเครื่องรับสัญญาณและคำนวณตำบลที่บนเรือ โดยดาวเทียมในระบบจะส่งสัญญาณที่ความถี่ ๑๕๐ และ ๔๐๐ เมกะเฮิรตซ์ การเปรียบเทียบการเปลี่ยนแปลงความถี่จากดาวเทียมสองดวงจะให้เส้นตำบลที่ ๑ เส้น ส่วนตำบลที่แน่นอน (FIX) จะได้จากการเปรียบเทียบการเปลี่ยนแปลงความถี่จากดาวเทียมอย่างน้อย ๓ ดวง (ปกติจะใช้ดาวเทียม ๔ – ๗ ดวงเพื่อเพิ่มความถูกต้อง) โดยวงโคจรของดาวเทียมแต่ละดวงจะ ครอบคลุมทุกจุดบนพื้นโลกอย่างน้อยวันละ ๒ ครั้ง และการหาตำบลที่แน่นอนด้วยดาวเทียม ๔ ดวงจะทำได้ทุก ๓๕ – ๙๕ นาที
ระบบ GPS
ระบบหาที่เรือด้วยดาวเทียม GLOBAL POSITIONAL SYSTEM หรือ GPS ในปัจจุบัน ถือกำเนิดมาจากการริเริ่มพัฒนาระบบ NAVSTAR GPS (NAVIGATION SYSTEM USING TIMING AND RANGING GLOBAL POSITIONING SYSTEM) โดยกระทรวงกลาโหมสหรัฐฯ ในปี ค.ศ.๑๙๗๓ (พ.ศ.๒๕๑๖) เพื่อใช้เป็นระบบหาตำบลที่แบบสามมิติที่ให้ทั้งตำบลที่และความสูงได้อย่างต่อเนื่องสำหรับเรือและอากาศยานในกองทัพ แทนระบบ TRANSIT ที่ให้ตำบลที่เพียงสองมิติเป็นระยะๆ ทุก ๓๕ – ๙๕ นาที

ระบบ GPS ประกอบด้วยดาวเทียม ๒๘ ดวง โคจรรอบโลกที่ความสูง ๑๐,๙๐๐ ไมล์ แต่ละดวงโคจรรอบโลกทุก ๑๒ ชั่วโมง สถานีภาคพื้น ๕ แห่งทำหน้าที่ติดตามดาวเทียมในวงโคจรและส่งข้อมูลให้กับสถานีควบคุมหลักที่มลรัฐโคโลราโด และเครื่องรับสัญญาณทำหน้าที่คำนวณหาตำบลที่
การหาตำบลที่ในระบบ GPS ใช้หลักการ TIMING AND RANGING หรือการคำนวณระยะทางจากเวลาที่สัญญาณจากดาวเทียมเดินทางมาถึงเครื่องรับ โดยดาวเทียมแต่ละดวงจะส่งสัญญาณที่ความถี่ ๑๕๗๕.๔๒ เมกะเฮิรตซ์ (เรียกว่าความถี่ L1) และความถี่ ๑๒๒๗.๖๐ เมกะเฮิรตซ์ (เรียกว่าความถี่ L2) ข้อมูลในความถี่ L1 ประกอบด้วยสัญญาณหยาบ (COARSE ACQUISITION CODE – C/A CODE) สำหรับผู้ใช้ทั่วไป (STANDARD POSITIONING SERVICE – SPS) และสัญญาณละเอียด (PRECISION CODE – P CODE) ซึ่งเข้ารหัสสำหรับใช้ในกองทัพสหรัฐฯ เท่านั้น (PRECISE POSITIONING SERVICE – PPS) ส่วนข้อมูลในความถี่ L2 ประกอบด้วยสัญญาณ P CODE เพียงอย่างเดียว การส่งสัญญาณ P CODE ในสองความถี่ทำให้เครื่องรับสามารถเปรียบหาผลกระทบจากบรรยากาศชั้น IONOSPHERE เพื่อลดความคลาดเคลื่อนจากการรบกวนของชั้นบรรยากาศ
ลักษณะวงโคจรของดาวเทียม GPS ถูกออกแบบมาให้ทุกพื้นที่บนโลกสามารถมองเห็น ดาวเทียมได้อย่างน้อย ๔ ดวงตลอดเวลา โดยสัญญาณจากดาวเทียมหนึ่งดวงจะให้เส้นตำบลที่หนึ่งเส้นที่เกิดจากจุดตัดระหว่างพื้นผิวโลกกับทรงกลมที่มีรัศมีเท่ากับระยะทางจากดาวเทียม ตำบลที่แบบสองมิติจะได้จากจุดตัดระหว่างทรงกลมรัศมีจากดาวเทียม ๒ ดวงกับพื้นผิวโลก แต่เนื่องจากนาฬิกาในเครื่องรับอาจมีความคลาดเคลื่อนได้ ดังนั้นจึงต้องใช้ดาวเทียมดวงที่สามเพื่อแก้ค่าความคลาดเคลื่อนแบบเดียวกับการหาที่เรือชายฝั่งด้วยที่หมาย ๓ แห่ง และตำบลที่แบบสามมิติ (ตำบลที่และความสูง) จะหาได้จากดาวเทียมอย่างน้อย ๓ ดวง และใช้ดาวเทียมดวงที่ ๔ เพื่อแก้ค่าความคลาดเคลื่อน
ระบบ GPS มีมาตรการที่เกี่ยวข้องกับความปลอดภัยอยู่ ๒ มาตรการ คือการเติมค่าความคลาดเคลื่อนลงใน C/A CODE เพื่อลดความถูกต้องแม่นยำ เรียกว่ามาตรการ SELECTIVE AVAILABILITY และการป้องกันการรบกวนและปลอมแปลงสัญญาณ P CODE เรียกว่ามาตรการ ANTI-SPOOFING ต่อมาเมื่อวันที่ ๑ พฤษภาคม ค.ศ.๒๐๐๐ (พ.ศ.๒๕๔๓) รัฐบาลสหรัฐฯ ได้ประกาศยุติการใช้มาตรการ SELECTIVE AVAILABILITY ซึ่งเพิ่มความถูกต้องของบริการ SPS สำหรับผู้ใช้ทั่วไป แต่รัฐบาลสหรัฐฯ ยังคงมีขีดความสามารถในการเริ่มใช้มาตรการ SELECTIVE AVAILABILITY อีกเมื่อเห็นว่ามีความจำเป็น
GPS ด้วยการคำนวณค่าความคลาดเคลื่อนของสัญญาณ GPS จากสถานีฝั่งที่ทราบตำบลที่ แน่นอน จากนั้นสถานีฝั่งจะส่งค่าแก้ให้กับเครื่องรับในบริเวณใกล้เคียง ระบบ DGPS สามารถให้ตำบลที่ได้ถูกต้องแม่นยำเทียบเท่ากับบริการ PPS และสามารถแก้ค่าความคลาดเคลื่อนจากมาตรการ SELECTIVE AVAILABILITY ได้ แต่ระบบ DGPS มีพื้นที่ครอบคลุมค่อนข้างจำกัด เนื่องจากเครื่องรับจะต้องอยู่ภายในรัศมีประมาณ ๑๐๐ ไมล์จากสถานีฝั่ง
ระบบหาที่เรือด้วยดาวเทียมอื่นๆ
ระบบ GPS เป็นระบบหาที่เรือที่มีผู้ใช้มากที่สุดในปัจจุบัน โดยผู้ใช้ส่วนใหญ่ใช้สัญญาณ C/A CODE ซึ่งไม่มีมาตรการป้องกันการรบกวนสัญญาณ (ANTI-SPOOFING) เนื่องจากกระทรวงกลาโหมสหรัฐฯ เป็นผู้ควบคุมระบบ GPS เพื่อความมั่นคงของประเทศสหรัฐอเมริกาเป็นหลัก ด้วยเหตุนี้จึงมีหลายประเทศที่พยายามจะสร้างระบบหาที่เรือด้วยดาวเทียมของตนเองเพื่อทดแทนระบบ GPS หรือเพื่อเสริมความถูกต้องแม่นยำให้กับระบบ GPS สำหรับผู้ใช้ทั่วไป
ระบบหาที่เรือด้วยดาวเทียมที่เป็นคู่แข่งของระบบ GPS คือระบบ GLONASS หรือระบบ GLOBAL NAVIGATION SATELLITE SYSTEM ของอดีตสหภาพโซเวียต หรือรัสเซียในปัจจุบัน ระบบ GLONASS ถูกออกแบบในช่วงสงครามเย็นเพื่อทดแทนระบบ GPS ของสหรัฐอเมริกา โดยระบบ GLONASS มีความคล้ายคลึงกับระบบ GPS หลายประการ ทั้งทางด้านส่วนประกอบของระบบและหลักการทำงาน กล่าวคือระบบ GLONASS ประกอบด้วยดาวเทียม ๒๔ ดวง สถานี ภาคพื้นดินสำหรับติดตามและควบคุมดาวเทียมในวงโคจร และเครื่องรับสัญญาณและคำนวณหาตำบลที่ ระบบ GLONASS ใช้หลักการ TIMING AND RANGING เพื่อคำนวณหาตำบลที่ โดยให้บริการตำบลที่แบบปกติ (STANDARD PRECISION – SP) ด้วยความถี่ L1 และบริการตำบลที่แบบละเอียด (HIGH PRECISION – HP) ด้วยความถี่ L1 และ L2 เช่นเดียวกับระบบ GPS

ด้วยเหตุที่ทั้งระบบ GPS ของสหรัฐอเมริกา และระบบ GLONASS ของรัสเซียถูกควบคุมโดยหน่วยงานเพื่อความมั่นคง ดังนั้นการให้บริการสำหรับผู้ใช้ทั่วไปอาจถูกระงับหรือลด ความเที่ยงตรงในยามสงคราม สหภาพยุโรป (EUROPEAN UNION) จึงได้พยายามพัฒนาระบบ หาตำบลที่ด้วยดาวเทียมของตนเองขึ้น โดยระบบดังกล่าวจะเป็นระบบหาตำบลที่ด้วยดาวเทียม ระบบแรกที่ถูกสร้างขึ้นเพื่อผู้ใช้ทั่วไปเป็นหลัก และไม่ถูกควบคุมด้วยหน่วยงานเพื่อความมั่นคง โครงการระบบหาตำบลที่ด้วยดาวเทียมของยุโรป เป็นโครงการความร่วมมือระหว่างสหภาพยุโรปกับองค์การอวกาศยุโรป (EUROPEAN SPACE AGENCY) โครงการนี้แบ่งออกเป็นสองช่วง ในช่วงแรกเป็นโครงการระบบ ดาวเทียมแบบวงโคจรคงที่ (GEOSTATIONARY ORBIT SATELLITE) เพื่อเสริมความถูกต้องแม่นยำให้กับระบบ GPS และระบบ GLONASS เรียกว่าระบบ EGNOS (EUROPEAN GEOSTATIONARY NAVIGATION OVERLAY SYSTEM) ระบบ EGNOS ถูกพัฒนาขึ้นในช่วงปลายทศวรรษที่ ๑๙๘๐ และจะเริ่มเปิดให้บริการในปี ค.ศ.๒๐๐๔ (พ.ศ.๒๕๔๗) ส่วนประกอบสำคัญของระบบ ประกอบด้วยดาวเทียมวงโคจรคงที่ ๓ ดวง ให้พื้นที่ครอบคลุมทวีปยุโรป แอฟริกา มหาสมุทร แอตแลนติก และบริเวณใกล้เคียง โดยระบบ EGNOS ใช้ดาวเทียม ARTEMIS ขององค์การอวกาศ ยุโรป ร่วมกับดาวเทียม INMARSAT-3 อีก๒ ดวง ทำหน้าที่ส่งต่อ (RELAY) สัญญาณเวลาจากนาฬิกาอะตอม และสัญญาณค่าความน่าเชื่อถือของระบบ GPS จากสถานีภาคพื้น ซึ่งสามารถให้ค่าตำบลที่ที่มีค่าความถูกต้องถึง ๕ เมตร
ช่วงที่สองของโครงการคือการสร้างระบบหาตำบลที่ด้วยดาวเทียมของยุโรป หรือระบบ GALILEO โดยสหภาพยุโรปได้ประกาศเริ่มต้นโครงการระบบ GALILEO อย่างเป็นทางการเมื่อ ปี ค.ศ.๑๙๙๙ (พ.ศ.๒๕๔๕) และมีกำหนดส่งดาวเทียมขึ้นสู่วงโคจรในปี ค.ศ.๒๐๐๕ (พ.ศ.๒๕๔๙) ระบบ GALILEO ประกอบด้วยดาวเทียม ๓๐ ดวง สถานีติดตามและควบคุมภาคพื้นดิน และ เครื่องรับสัญญาณและคำนวณหาตำบลที่ ซึ่งสามารถรับสัญญาณจากดาวเทียม GPS และ GLONASS ได้ด้วย ระบบ GALILEO ยังเป็นอีกขั้นหนึ่งของการรวมระบบหาตำบลที่ต่างๆ เข้าด้วยกันเป็นระบบ GNSS (GLOBAL NAVIGATION SATELLITE SYSTEM) ซึ่งการรวมดาวเทียมหาตำบลที่ทั้งหมดเข้าเป็นระบบเดียวจะทำให้เครื่องรับสัญญาณสามารถใช้ดาวเทียมจำนวนมากกว่าเดิมในการคำนวณหาตำบลที่ ซึ่งจะให้ค่าตำบลที่ที่มีความถูกต้องแม่นยำมากกว่าการใช้ระบบใดระบบหนึ่งเพียงลำพัง
ระบบแผนที่อิเล็กทรอนิกส์
การพัฒนาระบบหาตำบลที่ด้วยดาวเทียมทำให้นักเดินเรือสามารถทราบตำบลที่ของเรือในทะเลเปิดห่างฝั่งได้อย่างถูกต้องแม่นยำและต่อเนื่องเป็นครั้งแรก นอกจากนั้นแล้วความก้าวหน้าของระบบคอมพิวเตอร์และอิเล็กทรอนิกส์ในปัจจุบัน ทำให้การรับส่งข้อมูลจากอุปกรณ์ต่างๆ ที่เกี่ยวข้องกับการเดินเรือ และการแสดงภาพสถานการณ์เป็นไปได้อย่างถูกต้องและรวดเร็ว ส่งผลให้ระบบ การรวบรวมข้อมูลจากระบบตรวจจับและอุปกรณ์ต่างๆ เข้าด้วยกันอย่างบูรณาการ (INTEGRATED BRIDGE SYSTEM) มีความเป็นไปได้ในปัจจุบัน ตลอดจนการนำข้อมูลต่างๆ ในแผนที่เดินเรือมา สร้างเป็นฐานข้อมูลคอมพิวเตอร์ สามารถกระทำได้อย่างปลอดภัยเทียบเท่ากับการสร้างแผนที่กระดาษแบบเดิม จึงได้มีหน่วยงานของรัฐบาลและบริษัท เอกชนในหลายๆ ประเทศ หันมาเริ่มพัฒนาระบบแผนที่อิเล็กทรอนิกส์ที่สามารถแสดงที่เรือและ ข้อมูลประกอบอื่นๆ บนแผนที่ได้ตลอดเวลา

ระบบแผนที่อิเล็กทรอนิกส์แบ่งออกได้เป็น ๒ ประเภทใหญ่ๆ คือระบบ ECS (ELECTRONIC CHARTING SYSTEM) กับระบบ ECDIS (ELECTRONIC CHART DISPLAY AND INFORMATION SYSTEM) โดยระบบทั้งสองมีความคล้ายกันคือการแสดงข้อมูลต่างๆ บนแผนที่อิเล็กทรอนิกส์ แต่ต่างกันตรงที่ระบบ ECDIS มีมาตรฐานรับรองแน่นอนจากองค์การ ระหว่างประเทศ และเป็นที่ยอมรับในทางกฎหมายว่าสามารถนำมาใช้ได้อย่างปลอดภัยเทียบเท่า การใช้แผนที่กระดาษกับการหาที่เรือแบบเดิม ในขณะที่ระบบ ECS ไม่ได้ผ่านการรับรอง และจำเป็นต้องใช้ร่วมกับแผนที่กระดาษจึงจะถูกต้องตามกฎหมาย อย่างไรก็ดีการที่ระบบ ECS ไม่ได้ผ่าน การรับรองไม่ได้หมายความว่าระบบ ECS ด้อยกว่าระบบ ECDIS เสมอไป ในปัจจุบันมีระบบ ECS หลายระบบที่มีขีดความสามารถใกล้เคียงหรือเทียบเท่าระบบ ECDIS

ส่วนประกอบหลักของระบบ แผนที่อิเล็กทรอนิกส์ประกอบด้วยแผนที่อิเล็กทรอนิกส์ในรูปของฐานข้อมูลหรือไฟล์คอมพิวเตอร์ จอแสดงผล และเครื่องคอมพิวเตอร์สำหรับประมวลผลข้อมูลจากไฟล์แผนที่อิเล็กทรอนิกส์และทำหน้าที่เชื่อมต่อกับอุปกรณ์อื่นๆ ในเรือ เช่นระบบหาที่เรือด้วยดาวเทียม เข็มทิศไยโร เรดาร์ และเครื่องหยั่งน้ำ เป็นต้น โดยแผนที่อิเล็กทรอนิกส์แบ่งออกได้เป็น ๒ ประเภท ตามลักษณะการนำข้อมูลมาสร้างไฟล์คอมพิวเตอร์ ได้แก่แผนที่ RASTER และแผนที่ VECTOR
แผนที่ RASTER คือการแสกนแผนที่กระดาษลงบนคอมพิวเตอร์ หรือการสร้างแผนที่เป็นไฟล์ภาพ และใส่พิกัดตำบลที่ลงบนไฟล์แผนที่นั้น วัตถุและเส้นต่างๆ บนแผนที่ RASTER จะถูกแสดงด้วยจุดสีที่เรียกว่า PIXEL แผนที่แบบนี้สามารถสร้างได้ง่าย และมีราคาถูก นอกจากนี้การใช้สีและสัญลักษณ์ต่างๆ เหมือนกับแผนที่กระดาษ ทำให้อ่านง่าย แต่แผนที่ RASTER ให้ข้อมูลได้ไม่ละเอียดเท่าแผนที่ VECTOR และไม่มีรายละเอียดเพิ่มเติมสำหรับวัตถุและสัญลักษณ์ต่างๆ บนแผนที่เนื่องจากวัตถุและสัญลักษณ์เหล่านั้นเป็นเพียงจุดสีที่ประกอบขึ้นมาเป็นภาพ
ส่วนแผนที่ VECTOR คือฐานข้อมูลที่ประกอบด้วยพิกัดตำบลที่ พร้อมทั้งข้อมูลรายละเอียดของวัตถุและพื้นที่ต่างๆ บนแผนที่นั้น โดยข้อมูลในแผนที่ถูกจัดเป็นชั้น (LAYER) ซึ่งผู้ใช้สามารถเลือกแสดงหรือไม่แสดงชั้นที่ต้องการได้ นอกจากนี้ผู้ใช้ยังสามารถเรียกดูข้อมูลเพิ่มเติมเกี่ยวกับวัตถุต่างๆ บนแผนที่ได้ แผนที่แบบ VECTOR ให้ข้อมูลที่ละเอียดกว่าแผนที่ RASTER และเนื่องจาก ข้อมูลต่างๆ ถูกบรรจุอยู่ในฐานข้อมูล การขยายขนาดแผนที่จึงทำให้เห็นรายละเอียดข้อมูลมากขึ้น ต่างจากแผนที่ RASTER ที่เป็นไฟล์ภาพ แต่การสร้างแผนที่ VECTOR มีความยุ่งยากและมีราคา แพงกว่า ทำให้แผนที่ RASTER ยังคงเป็นที่แพร่หลายอยู่

ในปัจจุบันได้มีผู้ผลิตแผนที่อิเล็กทรอนิกส์ออกมาหลายรูปแบบ ทั้งแบบ RASTER และ VECTOR องค์การอุทกศาสตร์สากล (INTERNATIONAL HYDROGRAPHIC OFFICE – IHO) จึงได้กำหนดมาตรฐานควบคุมแผนที่อิเล็กทรอนิกส์แบบ VECTOR สำหรับใช้กับระบบ ECDIS โดยแผนที่แบบนี้เรียกว่าแผนที่ ENC หรือ ELECTRONIC NAVIGATION CHART และองค์การกิจการทางทะเลระหว่างประเทศ (INTERNATIONAL MARITIME ORGANIZATION – IMO) ได้กำหนดมาตรฐานควบคุมระบบ ECDIS โดยรวม เพื่อให้สามารถนำมาใช้งานได้อย่างปลอดภัยเทียบเท่าการใช้แผนที่กระดาษตามสนธิสัญญาว่าด้วยความปลอดภัยของชีวิตในทะเล (SAFETY OF LIFE AT SEA CONVENTION – SOLAS CONVENTION)
สรุป
ศิลป์และศาสตร์แห่งการเดินเรือมีประวัติความเป็นอันยาวนานนับพันปีตั้งแต่ความอยากรู้อยากเห็นทำให้มนุษย์เริ่มออกท้าทายมหาสมุทรอันเวิ้งว้าง จนกระทั่งในปัจจุบันทะเลได้กลายเป็นเส้นทางขนส่งที่สำคัญและคุ้มค่าที่สุดในเชิงปริมาณ ซึ่งตลอดเวลาที่ผ่านมาการเดินเรือได้มีวิวัฒนาการมาเป็นลำดับตามความก้าวหน้าทางเทคโนโลยีของแต่ละยุคสมัย แต่ธรรมชาติของทะเลยังคงเต็มไปด้วยความยากลำบากและอันตราย โดยเฉพาะเมื่อนักเดินเรือประมาทและขาดการ เตรียมพร้อมที่ดี และถึงแม้ว่าเครื่องมืออิเล็กทรอนิกส์ในปัจจุบันจะช่วยเพิ่มความสะดวกสบายให้กับนักเดินเรือ แต่ก็ไม่ได้เป็นหลักประกันความปลอดภัยในการเดินเรือ นักเดินเรือสมัยใหม่จึงไม่ควร ละเลยความเข้าใจและการฝึกฝนวิธีการเดินเรือแบบต่างๆ นอกเหนือจากการเดินเรืออิเล็กทรอนิกส์ เพื่อไม่ให้ตกเป็นทาสของเครื่องมือและเทคโนโลยี เพราะวันหนึ่งเราอาจมีความจำเป็นต้องพึ่งวิธีการหาที่เรือแบบดั้งเดิมที่อาศัยเพียงเครื่องวัดดาวและการคำนวณเล็กน้อยก็เป็นได้